- VARIÉTÉS DIFFÉRENTIABLES
- VARIÉTÉS DIFFÉRENTIABLESOn a l’habitude de considérer que la notion de variété différentiable est due à B. Riemann. C’est en effet Riemann qui proposa d’appliquer à l’étude des ensembles d’objets non géométriques les méthodes qui avaient été inventées pour les courbes et les surfaces. Cette idée se révéla extrêmement féconde; elle fut longuement développée par les géomètres du XIXe siècle et du début du XXe siècle. Les variétés différentiables sont considérées maintenant comme un outil de base des mathématiques. L’exposé qui suit comprend deux parties, conformément à l’idée originale de Riemann.On trouvera d’abord, aux chapitres 1 à 5, la théorie générale , c’est-à-dire les conséquences de la notion de contact, indépendantes de toute notion métrique. Cette théorie générale des variétés peut être considérée comme la présentation moderne, et probablement définitive, du calcul différentiel.Une variété différentiable est un espace topologique sur lequel on a pu, d’une façon raisonnable, définir des fonctions différentiables. L’outil essentiel pour ce faire est la notion de carte locale, que l’on retrouve aussi dans les définitions des variétés algébriques [cf. GÉOMÉTRIE ALGÉBRIQUE], des surfaces de Riemann et des espaces analytiques [cf. FONCTIONS ANALYTIQUES]. Le but du présent exposé n’étant pas de faire une théorie complète des variétés différentiables, on s’est, pour l’essentiel, placé dans le cadre des sous-variétés d’un espace affine. Cette restriction n’est que de faible importance, puisque l’on peut démontrer (cf. TOPOLOGIE - Topologie différentielle, chap. 4) que toute variété abstraite qui est réunion d’une famille dénombrable de compacts est difféomorphe (cf. chap. 1) à une sous-variété d’un espace affine. De même, on n’étudiera ici que les variétés de classe 暈 秊.La seconde partie (chap. 6, 7 et 8) est consacrée à la géométrie différentielle , c’est-à-dire aux variétés munies d’une structure métrique. C’est le cas par exemple des sous-variétés des espaces En . Une telle métrique est donnée par un produit scalaire sur chacun des espaces vectoriels tangents; elle permet de définir des notions de volume, de courbure et de torsion qui généralisent celles que l’on connaît sur les surfaces et les courbes de E3 et E2 [cf. GÉOMÉTRIE DIFFÉRENTIELLE CLASSIQUE]. La géométrie différentielle est essentiellement l’étude des variétés munies d’une telle métrique. Pour certains problèmes, on doit munir les espaces tangents d’une structure plus riche, ou moins riche, qu’un produit scalaire; on obtient ainsi par exemple les variétés kählériennes et les variétés pseudo-riemanniennes. Pour garder à l’exposé qui suit le caractère le plus géométrique possible, on n’en parlera pas ici. On ne parlera pas non plus des développements récents de la géométrie différentielle, dont beaucoup auraient plutôt leur place dans un exposé d’analyse fonctionnelle.L’article GÉOMÉTRIE DIFFÉRENTIELLE CLASSIQUE est une bonne introduction, en dimensions 2 et 3, aux considérations développées dans le présent article; une certaine habitude du calcul différentiel classique (cf. CALCUL INFINITÉSIMAL - Calcul à plusieurs variables) et de l’algèbre linéaire (cf. algèbre LINÉAIRE ET MULTILINÉAIRE) est également indispensable.1. Notion de variété différentiableDans ce qui suit, En désigne l’espace topologique sous-jacent à Rn . Si U est un ouvert de En et 行 un ouvert de Ep , on définit les applications de classe 暈r , avec 1 諒 r 諒 + 秊, de U dans 行 (cf. CALCUL INFINITÉSIMAL - Calcul à plusieurs variables). Les fonctions de classe 暈r de U dans R forment une R-algèbre.Sous-variétés de EnLa notion de sous-variété de En est une généralisation de la notion de surface introduite dans l’article GÉOMÉTRIE DIFFÉRENTIELLE CLASSIQUE. On dit qu’un sous-ensemble localement fermé V de En est une sous-variété de dimension p si, pour tout point x de V, il existe un ouvert U de Ep et une application continue:
 qui est un homéomorphisme de U sur un voisinage de x dans V. On dit que V est une sous-variété de classe 暈k , avec 1 諒 k 諒 + 秊, si, pour tout point x de V, il existe un tel couple (U, 﨏) où 﨏 est une application de classe 暈k dont la différentielle, en chaque point de U, est de rang p . Le couple (U, 﨏) est appelé une carte différentiable de la variété. Le théorème des fonctions implicites entraîne que, si (Ui , 﨏i ) et (Uj , 﨏j ) sont deux cartes différentiables de la variété de classe 暈k , alors 﨏j -1 獵 﨏i réalise un difféomorphisme de classe 暈k de l’ouvert 﨏i -1( 﨏j (Uj )) inclus dans Ui sur l’ouvert 﨏j -1( 﨏i (Ui )) inclus dans Uj (cf. GÉOMÉTRIE DIFFÉRENTIELLE CLASSIQUE, fig. 6, où il faut remplacer S par V).Soit f une fonction numérique définie sur un ouvert 行 de la variété V de classe 暈k (on suppose que 行 est l’intersection de V et de l’ouvert O de En ) et soit r 諒 k ; alors, les deux conditions suivantes sont équivalentes.1. Il existe une fonction numérique F de classe 暈r définie sur O telle que f soit la restriction de F à 行.2. Pour toute carte différentiable (U, 﨏), la fonction numérique f 獵 﨏 définie sur 﨏-1( 行) est de classe 暈r .Une telle fonction f est appelée une fonction de classe 暈r définie sur l’ouvert 行 de la variété V de classe 暈k , avec k 閭 r .Systèmes de cartes et fonctions différentiablesDans la condition 2 ci-dessus, le fait que V soit un sous-ensemble de En n’intervient pas. Il doit donc être possible de définir des fonctions différentiables sur un espace topologique quelconque en se donnant un système de cartes; c’est ce que l’on va faire.Soit V un espace topologique séparé; on dira que l’on s’est donné un «système de cartes de dimension p qui est 暈k -compatible» sur V si l’on s’est donné un recouvrement de V par des ouverts Vi , pour i 捻 I, et, pour tout i , un homéomorphisme 﨏i d’un ouvert Ui de Ep sur Vi de telle façon que la condition (C) suivante soit vérifiée.
qui est un homéomorphisme de U sur un voisinage de x dans V. On dit que V est une sous-variété de classe 暈k , avec 1 諒 k 諒 + 秊, si, pour tout point x de V, il existe un tel couple (U, 﨏) où 﨏 est une application de classe 暈k dont la différentielle, en chaque point de U, est de rang p . Le couple (U, 﨏) est appelé une carte différentiable de la variété. Le théorème des fonctions implicites entraîne que, si (Ui , 﨏i ) et (Uj , 﨏j ) sont deux cartes différentiables de la variété de classe 暈k , alors 﨏j -1 獵 﨏i réalise un difféomorphisme de classe 暈k de l’ouvert 﨏i -1( 﨏j (Uj )) inclus dans Ui sur l’ouvert 﨏j -1( 﨏i (Ui )) inclus dans Uj (cf. GÉOMÉTRIE DIFFÉRENTIELLE CLASSIQUE, fig. 6, où il faut remplacer S par V).Soit f une fonction numérique définie sur un ouvert 行 de la variété V de classe 暈k (on suppose que 行 est l’intersection de V et de l’ouvert O de En ) et soit r 諒 k ; alors, les deux conditions suivantes sont équivalentes.1. Il existe une fonction numérique F de classe 暈r définie sur O telle que f soit la restriction de F à 行.2. Pour toute carte différentiable (U, 﨏), la fonction numérique f 獵 﨏 définie sur 﨏-1( 行) est de classe 暈r .Une telle fonction f est appelée une fonction de classe 暈r définie sur l’ouvert 行 de la variété V de classe 暈k , avec k 閭 r .Systèmes de cartes et fonctions différentiablesDans la condition 2 ci-dessus, le fait que V soit un sous-ensemble de En n’intervient pas. Il doit donc être possible de définir des fonctions différentiables sur un espace topologique quelconque en se donnant un système de cartes; c’est ce que l’on va faire.Soit V un espace topologique séparé; on dira que l’on s’est donné un «système de cartes de dimension p qui est 暈k -compatible» sur V si l’on s’est donné un recouvrement de V par des ouverts Vi , pour i 捻 I, et, pour tout i , un homéomorphisme 﨏i d’un ouvert Ui de Ep sur Vi de telle façon que la condition (C) suivante soit vérifiée. est de classe 暈k .Soit f une fonction numérique définie sur un ouvert 行 de V; on dira que f est de classe 暈r , pour r 諒 k , si cette fonction vérifie la condition (C ) suivante.(C ) Quelle que soit la carte (Ui , 﨏i ) telle que Ui 惡 行 禮, l’application:
est de classe 暈k .Soit f une fonction numérique définie sur un ouvert 行 de V; on dira que f est de classe 暈r , pour r 諒 k , si cette fonction vérifie la condition (C ) suivante.(C ) Quelle que soit la carte (Ui , 﨏i ) telle que Ui 惡 行 禮, l’application: est de classe 暈r .La condition (C) implique que, si l’on a 行 說 Vi 惡 Vj , l’application f 獵 﨏i est de classe 暈r si et seulement si f 獵 﨏j est de classe 暈r . Cela assure que l’ensemble des fonctions de classe 暈r au voisinage d’un point x de V a des propriétés analogues à celles de l’ensemble des fonctions de classe 暈r au voisinage d’un point de Ep . Si l’on n’avait pas imposé cette condition (C), il n’en serait pas ainsi; il se pourrait même que les seules fonctions vérifiant la condition (C ) soient les fonctions constantes.Structure de variétéLes fonctions numériques de classe 暈r , avec r 諒 k , sur un ouvert 行 de V forment un anneau de fonctions; notons face=F9796 Cr size=1行 cet anneau. Pour tout ouvert 行 contenu dans 行, la restriction des fonctions définit un homomorphisme de face=F9796 Cr size=1行 size=1 dans face=F9796 Cr size=1行. On obtient ainsi un faisceau d’anneaux sur V (cf. TOPOLOGIE - Topologie algébrique, chap. 7). Par définition, une variété de classe 暈r et de dimension p est un espace topologique séparé sur lequel sont donnés des faisceaux d’anneaux face=F9796 C1, ..., face=F9796 Ck , qui peuvent être définis par la méthode que l’on vient de décrire. Les cartes ne sont qu’un outil pour définir ces faisceaux de fonctions; en particulier, deux sytèmes de cartes 暈k -compatibles qui définissent le même faisceau des fonctions de classe 暈r , pour tout r 諒 k , sont deux façons de définir la même variété.ExemplesIl est clair que tout ouvert de En est muni naturellement d’une structure de variété de dimension n qui peut être définie par une seule carte. Les surfaces régulières telles qu’elles sont définies dans l’article GÉOMÉTRIE DIFFÉRENTIELLE CLASSIQUE et, plus généralement, les sous-variétés de classe 暈k de En sont des variétés différentiables. Citons quelques exemples classiques de variétés.La sphère de dimension nUne sphère de dimension n est, par définition, l’ensemble Sn de points de En +1 dont les coordonnées (x 1, ..., x n +1) sont liées par la relation x 21 + ... + x 2n +1 = 1. C’est une sousvariété de classe 暈 秊 et de dimension n de En +1. En effet, soit:
est de classe 暈r .La condition (C) implique que, si l’on a 行 說 Vi 惡 Vj , l’application f 獵 﨏i est de classe 暈r si et seulement si f 獵 﨏j est de classe 暈r . Cela assure que l’ensemble des fonctions de classe 暈r au voisinage d’un point x de V a des propriétés analogues à celles de l’ensemble des fonctions de classe 暈r au voisinage d’un point de Ep . Si l’on n’avait pas imposé cette condition (C), il n’en serait pas ainsi; il se pourrait même que les seules fonctions vérifiant la condition (C ) soient les fonctions constantes.Structure de variétéLes fonctions numériques de classe 暈r , avec r 諒 k , sur un ouvert 行 de V forment un anneau de fonctions; notons face=F9796 Cr size=1行 cet anneau. Pour tout ouvert 行 contenu dans 行, la restriction des fonctions définit un homomorphisme de face=F9796 Cr size=1行 size=1 dans face=F9796 Cr size=1行. On obtient ainsi un faisceau d’anneaux sur V (cf. TOPOLOGIE - Topologie algébrique, chap. 7). Par définition, une variété de classe 暈r et de dimension p est un espace topologique séparé sur lequel sont donnés des faisceaux d’anneaux face=F9796 C1, ..., face=F9796 Ck , qui peuvent être définis par la méthode que l’on vient de décrire. Les cartes ne sont qu’un outil pour définir ces faisceaux de fonctions; en particulier, deux sytèmes de cartes 暈k -compatibles qui définissent le même faisceau des fonctions de classe 暈r , pour tout r 諒 k , sont deux façons de définir la même variété.ExemplesIl est clair que tout ouvert de En est muni naturellement d’une structure de variété de dimension n qui peut être définie par une seule carte. Les surfaces régulières telles qu’elles sont définies dans l’article GÉOMÉTRIE DIFFÉRENTIELLE CLASSIQUE et, plus généralement, les sous-variétés de classe 暈k de En sont des variétés différentiables. Citons quelques exemples classiques de variétés.La sphère de dimension nUne sphère de dimension n est, par définition, l’ensemble Sn de points de En +1 dont les coordonnées (x 1, ..., x n +1) sont liées par la relation x 21 + ... + x 2n +1 = 1. C’est une sousvariété de classe 暈 秊 et de dimension n de En +1. En effet, soit: la boule unité ouverte de En . Pour tout i , avec 1 諒 i 諒 n + 1, on définit deux applications 﨏i ,+ et 﨏i , 漣 de Bn dans En +1, en posant:
la boule unité ouverte de En . Pour tout i , avec 1 諒 i 諒 n + 1, on définit deux applications 﨏i ,+ et 﨏i , 漣 de Bn dans En +1, en posant: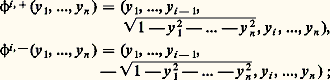 on voit que 﨏i ,+ réalise un homéomorphisme de Bn sur la partie Sn i ,+ de Sn dont la i -ème coordonnée est strictement positive et que 﨏i , size=1漣 réalise un homéomorphisme de Bn sur la partie Sn i , size=1漣 de Sn dont la i -ème coordonnée est strictement négative.Les applications 﨏i ,+ et 﨏i , size=1漣 sont de classe 暈 秊 et leurs différentielles sont toujours de rang n . Il en résulte que les 2 (n + 1) applications 﨏i ,+ et 﨏i , size=1漣 donnent un système de cartes pour Sn .Dans le cas n = 2, on obtient ainsi un système de six cartes pour la sphère S2 說 E3 représentant les hémisphères x 礪 0, x 麗 0, y 礪 0, y 麗 0, z 礪 0 et z 麗 0 (fig. 1). On aurait pu définir la même structure de variété sur la sphère S2 avec deux cartes en utilisant deux projections stéréographiques de pôle (0, 0, 1) et de pôle (0, 0, 漣 1) respectivement (cf. FONCTIONS ANALYTIQUES - Représentation conforme, chap. 3 et fig. 8).Les espaces projectifsDans l’article TOPOLOGIE - Topologie générale, à la fin du chapitre 1, on trouvera la définition de l’espace projectif réel Pn (R) de dimension n dont les points sont les droites de Rn +1 qui passent par l’origine. Pour définir la topologie, on associe à tout sous-espace affine U de Rn +1 qui ne passe pas par l’origine une injection:
on voit que 﨏i ,+ réalise un homéomorphisme de Bn sur la partie Sn i ,+ de Sn dont la i -ème coordonnée est strictement positive et que 﨏i , size=1漣 réalise un homéomorphisme de Bn sur la partie Sn i , size=1漣 de Sn dont la i -ème coordonnée est strictement négative.Les applications 﨏i ,+ et 﨏i , size=1漣 sont de classe 暈 秊 et leurs différentielles sont toujours de rang n . Il en résulte que les 2 (n + 1) applications 﨏i ,+ et 﨏i , size=1漣 donnent un système de cartes pour Sn .Dans le cas n = 2, on obtient ainsi un système de six cartes pour la sphère S2 說 E3 représentant les hémisphères x 礪 0, x 麗 0, y 礪 0, y 麗 0, z 礪 0 et z 麗 0 (fig. 1). On aurait pu définir la même structure de variété sur la sphère S2 avec deux cartes en utilisant deux projections stéréographiques de pôle (0, 0, 1) et de pôle (0, 0, 漣 1) respectivement (cf. FONCTIONS ANALYTIQUES - Représentation conforme, chap. 3 et fig. 8).Les espaces projectifsDans l’article TOPOLOGIE - Topologie générale, à la fin du chapitre 1, on trouvera la définition de l’espace projectif réel Pn (R) de dimension n dont les points sont les droites de Rn +1 qui passent par l’origine. Pour définir la topologie, on associe à tout sous-espace affine U de Rn +1 qui ne passe pas par l’origine une injection: où 﨏U(u ) est la droite de Rn +1 qui passe par u et par l’origine. On peut vérifier que les couples (U, 﨏U) forment un système de cartes 暈 秊-compatibles. Donc Pn (R) est une variété de classe 暈 秊 et de dimension n ; c’est une variété abstraite, c’est-à-dire qu’elle n’est pas, de manière naturelle, une sous-variété d’un espace En .Une construction analogue permet de définir un système de cartes sur l’espace projectif complexe Pn (C) des sous-espaces vectoriels de dimension complexe 1 de Cn +1. Ces cartes sont aussi 暈 秊-compatibles; elles identifient des ouverts de Pn (C) à des sous-espaces de dimension complexe n de Cn +1; donc Pn (C) est une variable de classe 暈 秊 et de dimension 2 n .Le groupe spécial orthogonal SO(3)On appelle groupe spécial orthogonal SO(3) le groupe des isométries directes de l’espace E3 qui conservent un point. C’est encore le groupe multiplicatif des matrices réelles carrées d’ordre 3, inversibles, dont l’inverse est égal à la transposée et dont le déterminant est positif. Ce groupe est utilisé depuis longtemps en mécanique dans l’étude des mouvements d’un solide dont un point est fixe. Il existe un voisinage U de zéro dans l’espace vectoriel des matrices antisymétriques réelles d’ordre 3 et un voisinage 行 de l’identité dans SO(3) tels que l’exponentielle matricielle:
où 﨏U(u ) est la droite de Rn +1 qui passe par u et par l’origine. On peut vérifier que les couples (U, 﨏U) forment un système de cartes 暈 秊-compatibles. Donc Pn (R) est une variété de classe 暈 秊 et de dimension n ; c’est une variété abstraite, c’est-à-dire qu’elle n’est pas, de manière naturelle, une sous-variété d’un espace En .Une construction analogue permet de définir un système de cartes sur l’espace projectif complexe Pn (C) des sous-espaces vectoriels de dimension complexe 1 de Cn +1. Ces cartes sont aussi 暈 秊-compatibles; elles identifient des ouverts de Pn (C) à des sous-espaces de dimension complexe n de Cn +1; donc Pn (C) est une variable de classe 暈 秊 et de dimension 2 n .Le groupe spécial orthogonal SO(3)On appelle groupe spécial orthogonal SO(3) le groupe des isométries directes de l’espace E3 qui conservent un point. C’est encore le groupe multiplicatif des matrices réelles carrées d’ordre 3, inversibles, dont l’inverse est égal à la transposée et dont le déterminant est positif. Ce groupe est utilisé depuis longtemps en mécanique dans l’étude des mouvements d’un solide dont un point est fixe. Il existe un voisinage U de zéro dans l’espace vectoriel des matrices antisymétriques réelles d’ordre 3 et un voisinage 行 de l’identité dans SO(3) tels que l’exponentielle matricielle: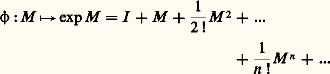 définisse un homéomorphisme de U sur 行. On a donc une carte (U, 﨏) telle que 﨏(U) = 行 soit un voisinage de l’identité. Pour tout point M de SO(3), on définit une carte (U, 﨏M ) telle que 﨏M (U) soit un voisinage de M , en posant 﨏M (A ) = M 練 﨏(A ) pour tout point A de U. On vérifie que toutes ces cartes forment un système 暈 秊-compatible; par conséquent SO(3) est une variété de classe 暈 秊 et de dimension 3.Cylindre et bande de MöbiusConsidérons deux rectangles, par exemple les deux bandes de papier de la figure 2 a; on va les recoller pour faire une variété de dimension 2. On recolle d’abord A à A (fig. 2 b), puis on recolle B à B . Il y a deux façons de le faire: on peut recoller le bord supérieur au bord supérieur et le bord inférieur au bord inférieur et on obtient un cylindre (fig. 2 c); on peut aussi tordre la feuille de façon à recoller le bord supérieur droit au bord inférieur gauche et le bord supérieur gauche au bord inférieur droit: on obtient une variété appelée bande de Möbius (fig. 2 d). Remarquons que la bande de Möbius n’a qu’une seule face: si les deux feuilles de papier sont rouges d’un côté et bleues de l’autre et si l’on a recollé A à A en respectant les couleurs, le recollement de B à B ne les respecte pas (cf. TOPOLOGIE - Topologie différentielle, chap. 1).Application de classe size=5暈kSoit U1 et U2 des ouverts de En et Ep ; une application continue f : U1U2 est de classe 暈r si et seulement si, pour toute fonction numérique 兀 de classe 暈r définie sur un ouvert 行 de U2, la fonction 兀 獵 f , définie sur l’ouvert f -1( 行) de U1, est de classe 暈r . Par analogie, si V et W sont des variétés de classe 暈k , on dit qu’une application continue f de V dans W est de classe 暈r , avec r 諒 k , si, pour tout ouvert 行 de W et pour toute fonction numérique 兀 de classe 暈r définie sur 行, la fonction numérique 兀 獵 f , définie sur l’ouvert f -1( 行) de V, est de classe 暈r . On démontre que:
définisse un homéomorphisme de U sur 行. On a donc une carte (U, 﨏) telle que 﨏(U) = 行 soit un voisinage de l’identité. Pour tout point M de SO(3), on définit une carte (U, 﨏M ) telle que 﨏M (U) soit un voisinage de M , en posant 﨏M (A ) = M 練 﨏(A ) pour tout point A de U. On vérifie que toutes ces cartes forment un système 暈 秊-compatible; par conséquent SO(3) est une variété de classe 暈 秊 et de dimension 3.Cylindre et bande de MöbiusConsidérons deux rectangles, par exemple les deux bandes de papier de la figure 2 a; on va les recoller pour faire une variété de dimension 2. On recolle d’abord A à A (fig. 2 b), puis on recolle B à B . Il y a deux façons de le faire: on peut recoller le bord supérieur au bord supérieur et le bord inférieur au bord inférieur et on obtient un cylindre (fig. 2 c); on peut aussi tordre la feuille de façon à recoller le bord supérieur droit au bord inférieur gauche et le bord supérieur gauche au bord inférieur droit: on obtient une variété appelée bande de Möbius (fig. 2 d). Remarquons que la bande de Möbius n’a qu’une seule face: si les deux feuilles de papier sont rouges d’un côté et bleues de l’autre et si l’on a recollé A à A en respectant les couleurs, le recollement de B à B ne les respecte pas (cf. TOPOLOGIE - Topologie différentielle, chap. 1).Application de classe size=5暈kSoit U1 et U2 des ouverts de En et Ep ; une application continue f : U1U2 est de classe 暈r si et seulement si, pour toute fonction numérique 兀 de classe 暈r définie sur un ouvert 行 de U2, la fonction 兀 獵 f , définie sur l’ouvert f -1( 行) de U1, est de classe 暈r . Par analogie, si V et W sont des variétés de classe 暈k , on dit qu’une application continue f de V dans W est de classe 暈r , avec r 諒 k , si, pour tout ouvert 行 de W et pour toute fonction numérique 兀 de classe 暈r définie sur 行, la fonction numérique 兀 獵 f , définie sur l’ouvert f -1( 行) de V, est de classe 暈r . On démontre que: est de classe 暈r si et seulement si, pour toute carte (U, 﨏) de V et pour toute carte (T, 祥) de W telles que f ( 﨏(U)) 惡 祥(T) 禮, l’application:
est de classe 暈r si et seulement si, pour toute carte (U, 﨏) de V et pour toute carte (T, 祥) de W telles que f ( 﨏(U)) 惡 祥(T) 禮, l’application: est de classe 暈r .Les variétés de classe 暈k et les applications de classe 暈r , avec r 諒 k , forment une catégorie; les isomorphismes de cette catégorie sont appelés les difféomorphismes de classe 暈r . Un difféomorphisme de classe 暈r de V sur W est donc un homéomorphisme f de V sur W tel que, pour tout ouvert O de V, la correspondance 兀 料 兀 獵 f soit une bijection de l’ensemble des fonctions numériques de classe 暈r définies sur f (O), sur l’ensemble des fonctions numériques de classe 暈r définies sur O.Sous-variétésLe théorème des fonctions implicites permet de donner deux nouvelles caractérisations des sous-variétés de En . Un sous-espace fermé V de En est une sous-variété de dimension p et de classe 暈k s’il vérifie l’une des deux conditions équivalentes suivantes.(C1) Pour tout point x de V, il existe un voisinage ouvert 行 de x dans En et une application 兀 de classe 暈k de 行 dans En -p qui est de rang n 漣 p en tout point de 行 et telle que 行 惡 V soit l’image inverse par 兀 d’un point de En -p .(C2) Pour tout point x de V, il existe un voisinage ouvert 行 de x dans En et un difféomorphisme 猪 de classe 暈k de 行 sur un ouvert O de En tels que 猪( 行 惡 V) = O 惡 Ep .Plus généralement, si V est un fermé de la variété W de classe 暈k et de dimension n , on dit que V est une sous-variété de dimension p et de classe 暈k de W si la condition suivante est vérifiée.(C 2) Pour tout point x de V, il existe un voisinage ouvert 行 de x dans W et un difféomorphisme 猪 de classe 暈k de 行 sur un ouvert O de En tels que 猪( 行 惡 V) = O 惡 Ep .Les applications:
est de classe 暈r .Les variétés de classe 暈k et les applications de classe 暈r , avec r 諒 k , forment une catégorie; les isomorphismes de cette catégorie sont appelés les difféomorphismes de classe 暈r . Un difféomorphisme de classe 暈r de V sur W est donc un homéomorphisme f de V sur W tel que, pour tout ouvert O de V, la correspondance 兀 料 兀 獵 f soit une bijection de l’ensemble des fonctions numériques de classe 暈r définies sur f (O), sur l’ensemble des fonctions numériques de classe 暈r définies sur O.Sous-variétésLe théorème des fonctions implicites permet de donner deux nouvelles caractérisations des sous-variétés de En . Un sous-espace fermé V de En est une sous-variété de dimension p et de classe 暈k s’il vérifie l’une des deux conditions équivalentes suivantes.(C1) Pour tout point x de V, il existe un voisinage ouvert 行 de x dans En et une application 兀 de classe 暈k de 行 dans En -p qui est de rang n 漣 p en tout point de 行 et telle que 行 惡 V soit l’image inverse par 兀 d’un point de En -p .(C2) Pour tout point x de V, il existe un voisinage ouvert 行 de x dans En et un difféomorphisme 猪 de classe 暈k de 行 sur un ouvert O de En tels que 猪( 行 惡 V) = O 惡 Ep .Plus généralement, si V est un fermé de la variété W de classe 暈k et de dimension n , on dit que V est une sous-variété de dimension p et de classe 暈k de W si la condition suivante est vérifiée.(C 2) Pour tout point x de V, il existe un voisinage ouvert 行 de x dans W et un difféomorphisme 猪 de classe 暈k de 行 sur un ouvert O de En tels que 猪( 行 惡 V) = O 惡 Ep .Les applications: forment un système de cartes 暈k -compatibles sur V. Donc V est naturellement muni d’une structure de variété de classe 暈k .Si l’on regarde les exemples donnés plus haut, on constate que, pour p 麗 n , la sphère Sp est une sous-variété de Sn , l’espace projectif réel Pp (R) est une sous-variété de l’espace Pn (R) et l’espace projectif complexe Pp (C) est une sous-variété de Pn (C). On remarquera aussi que la caractérisation des sous-variétés de En par la condition (C1) montre que SO(3) est une sous-variété de E9 (qui s’identifie à l’espace vectoriel des matrices carrées d’ordre 3) puisque l’équation t MM = I est équivalente à une équation F(M ) = O , où F est une application de classe 暈 秊 de E9 dans E6, qui est de rang 6 au voisinage de chaque point de SO(3).Variétés à bordSoit V une variété de classe 暈k et de dimension n et soit X un fermé de V dont la frontière (c’est-à-dire l’ensemble des points de X dont tous les voisinages rencontrent X et V 漣 X) est une sous-variété de dimension n 漣 1 et de classe 暈k de V: on dit que X est une variété à bord de dimension n et de classe 暈k et la frontière de X est appelée le bord de X.Dans une variété à bord de dimension n , tout point non situé sur le bord a un voisinage difféomorphe à un ouvert de Rn et tout point situé sur le bord a un voisinage difféomorphe à un voisinage de R+n , en désignant par R+n le fermé de Rn formé des points dont la dernière coordonnée est positive ou nulle. Ainsi, la boule unité Dn de Rn (pour la distance euclidienne) est une variété à bord dont le bord est la sphère Sn -1. La demisphère2. Vecteurs tangentsDans ce qui suit, pour tout point M de En , on considère l’espace vectoriel (En )M des vecteurs d’origine M; cet espace est isomorphe à Rn . Plus précisément, Rn est l’espace vectoriel des vecteurs ayant pour origine le point O. En associant à tout vecteur d’origine M le vecteur d’origine O qui lui est équipollent, on définit un isomorphisme de (En )M sur (En )O = Rn ; l’image inverse de la base naturelle de Rn par cet isomorphisme définit une base naturelle sur (En )M.Vecteurs tangents à une sous-variété de EnSoit M un point d’une sous-variété V de classe 暈k , avec k 閭 1, et de dimension p de En et soit (U1, 﨏1) et (U2, 﨏2) deux cartes différentiables au voisinage de M; les différentielles de 﨏1 au point 﨏1-1(M) et de 﨏2 au point 﨏2-1(M) sont deux applications linéaires de Rp dans Rn qui ont même image, puisqu’elles diffèrent par la différentielle de 﨏1-1 獵 﨏2 au point 﨏2-1(M). On dit qu’un vecteur d’origine M dans En est tangent à V en M s’il est parallèle à cette image; les vecteurs tangents à V en M forment un sous-espace vectoriel de dimension p de (En )M, que l’on notera T(V)M.Les vecteurs tangents à V en M sont encore les vecteurs vitesse en M des trajectoires tracées sur V et passant par M. Si V est une surface de E3, on retrouve exactement le plan tangent au sens habituel.Remarquons enfin que les vecteurs tangents à En lui-même au point M sont les vecteurs d’origine M; donc on a l’égalité T(En )M = (En )M.Opérateurs de dérivationSoit X un vecteur tangent à V en M dont on notera X1, X2, ..., Xn les coordonnées dans la base naturelle de (En )M; soit f une fonction de classe 暈1 définie sur un voisinage de M dans V et soit F une fonction de classe 暈1 définie sur un voisinage de M dans En qui prolonge f . Alors la quantité:
forment un système de cartes 暈k -compatibles sur V. Donc V est naturellement muni d’une structure de variété de classe 暈k .Si l’on regarde les exemples donnés plus haut, on constate que, pour p 麗 n , la sphère Sp est une sous-variété de Sn , l’espace projectif réel Pp (R) est une sous-variété de l’espace Pn (R) et l’espace projectif complexe Pp (C) est une sous-variété de Pn (C). On remarquera aussi que la caractérisation des sous-variétés de En par la condition (C1) montre que SO(3) est une sous-variété de E9 (qui s’identifie à l’espace vectoriel des matrices carrées d’ordre 3) puisque l’équation t MM = I est équivalente à une équation F(M ) = O , où F est une application de classe 暈 秊 de E9 dans E6, qui est de rang 6 au voisinage de chaque point de SO(3).Variétés à bordSoit V une variété de classe 暈k et de dimension n et soit X un fermé de V dont la frontière (c’est-à-dire l’ensemble des points de X dont tous les voisinages rencontrent X et V 漣 X) est une sous-variété de dimension n 漣 1 et de classe 暈k de V: on dit que X est une variété à bord de dimension n et de classe 暈k et la frontière de X est appelée le bord de X.Dans une variété à bord de dimension n , tout point non situé sur le bord a un voisinage difféomorphe à un ouvert de Rn et tout point situé sur le bord a un voisinage difféomorphe à un voisinage de R+n , en désignant par R+n le fermé de Rn formé des points dont la dernière coordonnée est positive ou nulle. Ainsi, la boule unité Dn de Rn (pour la distance euclidienne) est une variété à bord dont le bord est la sphère Sn -1. La demisphère2. Vecteurs tangentsDans ce qui suit, pour tout point M de En , on considère l’espace vectoriel (En )M des vecteurs d’origine M; cet espace est isomorphe à Rn . Plus précisément, Rn est l’espace vectoriel des vecteurs ayant pour origine le point O. En associant à tout vecteur d’origine M le vecteur d’origine O qui lui est équipollent, on définit un isomorphisme de (En )M sur (En )O = Rn ; l’image inverse de la base naturelle de Rn par cet isomorphisme définit une base naturelle sur (En )M.Vecteurs tangents à une sous-variété de EnSoit M un point d’une sous-variété V de classe 暈k , avec k 閭 1, et de dimension p de En et soit (U1, 﨏1) et (U2, 﨏2) deux cartes différentiables au voisinage de M; les différentielles de 﨏1 au point 﨏1-1(M) et de 﨏2 au point 﨏2-1(M) sont deux applications linéaires de Rp dans Rn qui ont même image, puisqu’elles diffèrent par la différentielle de 﨏1-1 獵 﨏2 au point 﨏2-1(M). On dit qu’un vecteur d’origine M dans En est tangent à V en M s’il est parallèle à cette image; les vecteurs tangents à V en M forment un sous-espace vectoriel de dimension p de (En )M, que l’on notera T(V)M.Les vecteurs tangents à V en M sont encore les vecteurs vitesse en M des trajectoires tracées sur V et passant par M. Si V est une surface de E3, on retrouve exactement le plan tangent au sens habituel.Remarquons enfin que les vecteurs tangents à En lui-même au point M sont les vecteurs d’origine M; donc on a l’égalité T(En )M = (En )M.Opérateurs de dérivationSoit X un vecteur tangent à V en M dont on notera X1, X2, ..., Xn les coordonnées dans la base naturelle de (En )M; soit f une fonction de classe 暈1 définie sur un voisinage de M dans V et soit F une fonction de classe 暈1 définie sur un voisinage de M dans En qui prolonge f . Alors la quantité: ne dépend pas du choix du prolongement F; elle ne dépend que de X et de f . On l’appelle la dérivée de f suivant le vecteur X et on la note X(f ). On vérifie facilement que:1. Cette dérivée X(f ) ne dépend que du germe de f en M, c’est-à-dire que, si f et g coïncident sur un voisinage de M, alors X(f ) = X(g );Un opérateur U sur l’ensemble des fonctions de classe 暈1 définies au voisinage de M qui vérifie ces trois propriétés est appelé un opérateur de dérivation en M. On démontre que, pour tout opérateur de dérivation U en un point M d’une sous-variété V de classe 暈2 de En , il existe un vecteur X tangent à V en M et un seul tel que X(f ) = U(f ) pour toute fonction f de classe 暈2. Par analogie, on définit l’espace tangent en M à une variété abstraite V comme l’ensemble des dérivations en M.Applications tangentesSi 﨏: VW est une application de classe 暈1, à toute dérivation X au point M de V on associe une dérivation 﨏(X) au point 﨏(M) de W, en posant:
ne dépend pas du choix du prolongement F; elle ne dépend que de X et de f . On l’appelle la dérivée de f suivant le vecteur X et on la note X(f ). On vérifie facilement que:1. Cette dérivée X(f ) ne dépend que du germe de f en M, c’est-à-dire que, si f et g coïncident sur un voisinage de M, alors X(f ) = X(g );Un opérateur U sur l’ensemble des fonctions de classe 暈1 définies au voisinage de M qui vérifie ces trois propriétés est appelé un opérateur de dérivation en M. On démontre que, pour tout opérateur de dérivation U en un point M d’une sous-variété V de classe 暈2 de En , il existe un vecteur X tangent à V en M et un seul tel que X(f ) = U(f ) pour toute fonction f de classe 暈2. Par analogie, on définit l’espace tangent en M à une variété abstraite V comme l’ensemble des dérivations en M.Applications tangentesSi 﨏: VW est une application de classe 暈1, à toute dérivation X au point M de V on associe une dérivation 﨏(X) au point 﨏(M) de W, en posant: on définit ainsi une application linéaire 﨏 de T(V)M dans T(W) size=1﨏(M).Si V = En et W = Eq , les espaces T(V)M et T(W) size=1﨏(M) s’identifient à Rn et à Rq et 﨏 s’identifie à la différentielle de 﨏 en M (cf. CALCUL INFINITÉSIMAL - Calcul à plusieurs variables, chap. 2); c’est pourquoi 﨏 est, dans tous les cas, appelée la différentielle de 﨏 ou l’application linéaire tangente à 﨏 en M. Les théorèmes d’inversion locale et des fonctions implicites impliquent que, si 﨏 est bijective (resp. injective, surjective), alors 﨏 est bijective (resp. injective, surjective) dans un voisinage de M.Fibré tangentOn suppose dorénavant que V est une sous-variété de classe 暈 秊 et de dimension p de En . Soit T(V) la réunion des espaces vectoriels T(V)M. On définit une injection de T(V) dans V 憐 Rn en associant au vecteur X tangent à V en M le couple formé du point M et du vecteur d’origine O équipollent à X. L’image de cette injection est une sous-variété de classe 暈 秊 et de dimension 2p de V 憐 Rn ; donc T(V) se trouve muni d’une structure de variété de classe 暈 秊 et de dimension 2p . La projection 神 de T(V) sur V qui à tout vecteur tangent associe son point de contact est de classe 暈 秊. Pour tout point M de V, 神-1(V) = T(V)M est un espace vectoriel isomorphe à Rp ; donc, avec les notations de l’article TOPOLOGIE - Topologie algébrique (chap. 6), l’application:
on définit ainsi une application linéaire 﨏 de T(V)M dans T(W) size=1﨏(M).Si V = En et W = Eq , les espaces T(V)M et T(W) size=1﨏(M) s’identifient à Rn et à Rq et 﨏 s’identifie à la différentielle de 﨏 en M (cf. CALCUL INFINITÉSIMAL - Calcul à plusieurs variables, chap. 2); c’est pourquoi 﨏 est, dans tous les cas, appelée la différentielle de 﨏 ou l’application linéaire tangente à 﨏 en M. Les théorèmes d’inversion locale et des fonctions implicites impliquent que, si 﨏 est bijective (resp. injective, surjective), alors 﨏 est bijective (resp. injective, surjective) dans un voisinage de M.Fibré tangentOn suppose dorénavant que V est une sous-variété de classe 暈 秊 et de dimension p de En . Soit T(V) la réunion des espaces vectoriels T(V)M. On définit une injection de T(V) dans V 憐 Rn en associant au vecteur X tangent à V en M le couple formé du point M et du vecteur d’origine O équipollent à X. L’image de cette injection est une sous-variété de classe 暈 秊 et de dimension 2p de V 憐 Rn ; donc T(V) se trouve muni d’une structure de variété de classe 暈 秊 et de dimension 2p . La projection 神 de T(V) sur V qui à tout vecteur tangent associe son point de contact est de classe 暈 秊. Pour tout point M de V, 神-1(V) = T(V)M est un espace vectoriel isomorphe à Rp ; donc, avec les notations de l’article TOPOLOGIE - Topologie algébrique (chap. 6), l’application: définit un fibré de base V et de fibre Rp . Pour toute carte (U, 﨏) de V, on définit un difféomorphisme de classe 暈 秊 de U 憐 Rp sur 神-1(U), en associant à (u , t ) le vecteur d’origine 﨏(u ) qui est équipollent à l’image de t par la différentielle de 﨏 en u . Cela nous donne des trivialisations locales du fibré 神: T(V)V. Les changements de trivialisation sont définis par les différentielles des changements de cartes; le fibré est donc naturellement muni du groupe structural GL(p , R).Groupes à un paramètreOn appelle champ de vecteurs sur V la donnée, pour tout point M de V, d’un vecteur tangent à V en M, c’est-à-dire une application X: VT(V) telle que 神 獵 X soit l’application identique de V. On ne considérera que les champs de vecteurs de classe 暈 秊, c’est-à-dire tels que X: VT(V) soit une application de classe 暈 秊; pour toute fonction f de classe 暈 秊 sur V, la fonction M 料 X(M)(f ) est alors une fonction de classe 暈 秊.Étant donné un champ de vecteurs X de classe 暈 秊 sur la sous-variété V de En , on peut chercher les trajectoires:
définit un fibré de base V et de fibre Rp . Pour toute carte (U, 﨏) de V, on définit un difféomorphisme de classe 暈 秊 de U 憐 Rp sur 神-1(U), en associant à (u , t ) le vecteur d’origine 﨏(u ) qui est équipollent à l’image de t par la différentielle de 﨏 en u . Cela nous donne des trivialisations locales du fibré 神: T(V)V. Les changements de trivialisation sont définis par les différentielles des changements de cartes; le fibré est donc naturellement muni du groupe structural GL(p , R).Groupes à un paramètreOn appelle champ de vecteurs sur V la donnée, pour tout point M de V, d’un vecteur tangent à V en M, c’est-à-dire une application X: VT(V) telle que 神 獵 X soit l’application identique de V. On ne considérera que les champs de vecteurs de classe 暈 秊, c’est-à-dire tels que X: VT(V) soit une application de classe 暈 秊; pour toute fonction f de classe 暈 秊 sur V, la fonction M 料 X(M)(f ) est alors une fonction de classe 暈 秊.Étant donné un champ de vecteurs X de classe 暈 秊 sur la sous-variété V de En , on peut chercher les trajectoires: tracées sur V possédant la propriété (P) suivante:
tracées sur V possédant la propriété (P) suivante: c’est-à-dire qu’en tout point 塚(t ) le vecteur vitesse est égal au vecteur du champ.Ce problème n’est autre que la résolution d’une équation différentielle. On démontre que, pour tout point M de V, il existe des trajectoires 塚: ] 見, 廓[V vérifiant (P) et telles que 0 捻 ] 見, 廓[ et 塚(0) = M. De plus, deux telles trajectoires coïncident là où elles sont définies. Si la variété V est compacte, parmi ces courbes il en existe une qui est définie sur R tout entier; on la notera 塚M. L’application:
c’est-à-dire qu’en tout point 塚(t ) le vecteur vitesse est égal au vecteur du champ.Ce problème n’est autre que la résolution d’une équation différentielle. On démontre que, pour tout point M de V, il existe des trajectoires 塚: ] 見, 廓[V vérifiant (P) et telles que 0 捻 ] 見, 廓[ et 塚(0) = M. De plus, deux telles trajectoires coïncident là où elles sont définies. Si la variété V est compacte, parmi ces courbes il en existe une qui est définie sur R tout entier; on la notera 塚M. L’application: définie par:
définie par: est de classe 暈 秊. On a évidemment g (M, 0) = M, pour tout M, et on vérifie la relation:
est de classe 暈 秊. On a évidemment g (M, 0) = M, pour tout M, et on vérifie la relation: il en résulte que, quel que soit t , l’application:
il en résulte que, quel que soit t , l’application: est un difféomorphisme de classe 暈 秊 de V et que g t +t size=1 est le difféomorphisme composé de g t et de g t size=1. On a donc un homomorphisme t 料 g t du groupe additif R dans le groupe des difféomorphismes de V. La donnée de cet homomorphisme est équivalente à celle du champ X puisque:
est un difféomorphisme de classe 暈 秊 de V et que g t +t size=1 est le difféomorphisme composé de g t et de g t size=1. On a donc un homomorphisme t 料 g t du groupe additif R dans le groupe des difféomorphismes de V. La donnée de cet homomorphisme est équivalente à celle du champ X puisque: OrientationSoit (e 1, ..., e n ) et (e 1, ..., e n ) deux bases ordonnées de l’espace vectoriel E; on dit qu’elles sont orientablement compatibles s’il existe une famille de bases (f 1(t ), ..., f n (t )) dépendant continûment du paramètre t telle que (f 1(0), ..., f n (0)) = (e 1, ..., e n ) et (f 1(1), ..., f n (1)) = (e 1, ..., e n ). Il revient au même de dire que le déterminant de la matrice de changement de base est positif. Cette relation est évidemment transitive et elle partage donc l’ensemble des bases de E en deux classes (chacune de ces classes étant formée de bases deux à deux compatibles) appelées les deux classes d’orientation de E.Orienter une variété différentiable V de dimension n en un point M, c’est choisir uneclasse d’orientation de l’espace vectoriel T(V)M.Supposons la variété V (de dimension n ) orientée en M; si (X1, ..., Xn ) sont n champs de vecteurs définis et continus sur un voisinage du point M et tels que les vecteurs (X1(M), ..., Xn (M)) forment une base orientée de T(V)M, alors en tout point N assez voisin de M, les vecteurs (X1(N), ..., Xn (N)) forment une base de T(V)N et par conséquent ils définissent une orientation de V en N. Cette orientation ne dépend pas des champs choisis; elle ne dépend que de l’orientation choisie en M. Donc le choix d’une orientation en M définit une orientation aux points voisins; on peut ainsi en quelque sorte «faire varier continûment l’orientation» au voisinage de M. On dit que V est orientée si l’on a choisi en chacun de ses points une orientation qui varie ainsi continûment au voisinage de chaque point.Soit U un ouvert de En ; les champs de vecteurs:
OrientationSoit (e 1, ..., e n ) et (e 1, ..., e n ) deux bases ordonnées de l’espace vectoriel E; on dit qu’elles sont orientablement compatibles s’il existe une famille de bases (f 1(t ), ..., f n (t )) dépendant continûment du paramètre t telle que (f 1(0), ..., f n (0)) = (e 1, ..., e n ) et (f 1(1), ..., f n (1)) = (e 1, ..., e n ). Il revient au même de dire que le déterminant de la matrice de changement de base est positif. Cette relation est évidemment transitive et elle partage donc l’ensemble des bases de E en deux classes (chacune de ces classes étant formée de bases deux à deux compatibles) appelées les deux classes d’orientation de E.Orienter une variété différentiable V de dimension n en un point M, c’est choisir uneclasse d’orientation de l’espace vectoriel T(V)M.Supposons la variété V (de dimension n ) orientée en M; si (X1, ..., Xn ) sont n champs de vecteurs définis et continus sur un voisinage du point M et tels que les vecteurs (X1(M), ..., Xn (M)) forment une base orientée de T(V)M, alors en tout point N assez voisin de M, les vecteurs (X1(N), ..., Xn (N)) forment une base de T(V)N et par conséquent ils définissent une orientation de V en N. Cette orientation ne dépend pas des champs choisis; elle ne dépend que de l’orientation choisie en M. Donc le choix d’une orientation en M définit une orientation aux points voisins; on peut ainsi en quelque sorte «faire varier continûment l’orientation» au voisinage de M. On dit que V est orientée si l’on a choisi en chacun de ses points une orientation qui varie ainsi continûment au voisinage de chaque point.Soit U un ouvert de En ; les champs de vecteurs: donnent une orientation de U; il en résulte que toute carte différentiable U﨏(U) 說 V donne une orientation de V au-dessus de 﨏(U): elle est définie par les images des champs 煉/ 煉x i par 﨏. Si (U , 﨏 ) est une autre carte, on a deux orientations au-dessus de 﨏(U) 惡 﨏 (U ); l’une est définie par les images des 煉/ 煉x i par 﨏, l’autre par les images des 煉/ 煉x i par 﨏 . La matrice de passage entre ces deux bases est la différentielle de l’application:
donnent une orientation de U; il en résulte que toute carte différentiable U﨏(U) 說 V donne une orientation de V au-dessus de 﨏(U): elle est définie par les images des champs 煉/ 煉x i par 﨏. Si (U , 﨏 ) est une autre carte, on a deux orientations au-dessus de 﨏(U) 惡 﨏 (U ); l’une est définie par les images des 煉/ 煉x i par 﨏, l’autre par les images des 煉/ 煉x i par 﨏 . La matrice de passage entre ces deux bases est la différentielle de l’application: donc tout système de cartes dont les changements de cartes ont des différentielles à déterminant positif donne une orientation de V. Toute orientation de V s’obtient de cette façon.Il existe des variétés qui ne sont pas orientables. Parmi celles-ci, on trouve la bande de Möbius, qui a été définie ci-dessus (fig. 2) avec deux cartes (F, 﨏) et (F , 﨏 ) telles que l’ensemble 﨏-1( 﨏 (F )) soit formé de deux parties disjointes A et B; si l’on choisit les orientations de F et F de façon que le déterminant de la différentielle de 﨏-1 獵 﨏 soit positif sur A, il est négatif sur B, et inversement. Si une variété connexe est orientable, elle a deux orientations qui sont opposées l’une à l’autre en chaque point.Soit W une sous-variété de dimension n 漣 1 d’une variété orientée de dimension n et soit Y un champ de vecteurs continu défini sur un voisinage de W dans V et tel que, en tout point M de W, le vecteur Y(M) n’appartienne pas à T(W)M; alors les bases (e 1, ..., e n -1) de T(W)M telles que (e 1, ..., e n -1, Y(M)) soit une base orientée de T(V)M forment une classe d’orientation de T(W)M. On vérifie que les orientations ainsi définies en chaque point de W forment une orientation de W. En particulier, si X est une variété orientable à bord, le bord W de X est une variété orientable; il existe en effet deux sortes de champs de vecteurs Y possibles, les champs sortants et les champs rentrants. De la même façon, si W est une sous-variété de dimension n 漣 1 de En , pour orienter W, il suffit de choisir un champ continu sur W qui en chaque point soit normal à W. C’est de cette façon que l’on oriente habituellement les surfaces de E3, par la règle du bonhomme d’Ampère. On remarquera d’ailleurs que, si un tel champ normal n’existe pas, la sous-variété n’est pas orientable; c’est ce qui se passe pour la bande de Möbius. Pour une surface dans E3, on montre que les trois conditions suivantes sont équivalentes:1. W est orientable;2. Il existe un champ continu normal à W;3. On peut distinguer les deux faces.3. TenseursFormes de degré 1Pour tout ce chapitre, nous renvoyons également à l’article calcul TENSORIEL.L’espace vectoriel face=F9796 des champs de vecteurs de classe 暈 秊 sur V est naturellement muni d’une structure de module sur l’anneau face=F9796 C 秊 des fonctions de classe 暈 秊. Une forme 諸 de degré 1 est une application face=F9796 C 秊-linéaire de face=F9796 dans face=F9796 C 秊, c’est-à-dire la donnée, pour tout champ X, d’une fonction 諸(X) de classe 暈 秊 de façon que l’on ait:
donc tout système de cartes dont les changements de cartes ont des différentielles à déterminant positif donne une orientation de V. Toute orientation de V s’obtient de cette façon.Il existe des variétés qui ne sont pas orientables. Parmi celles-ci, on trouve la bande de Möbius, qui a été définie ci-dessus (fig. 2) avec deux cartes (F, 﨏) et (F , 﨏 ) telles que l’ensemble 﨏-1( 﨏 (F )) soit formé de deux parties disjointes A et B; si l’on choisit les orientations de F et F de façon que le déterminant de la différentielle de 﨏-1 獵 﨏 soit positif sur A, il est négatif sur B, et inversement. Si une variété connexe est orientable, elle a deux orientations qui sont opposées l’une à l’autre en chaque point.Soit W une sous-variété de dimension n 漣 1 d’une variété orientée de dimension n et soit Y un champ de vecteurs continu défini sur un voisinage de W dans V et tel que, en tout point M de W, le vecteur Y(M) n’appartienne pas à T(W)M; alors les bases (e 1, ..., e n -1) de T(W)M telles que (e 1, ..., e n -1, Y(M)) soit une base orientée de T(V)M forment une classe d’orientation de T(W)M. On vérifie que les orientations ainsi définies en chaque point de W forment une orientation de W. En particulier, si X est une variété orientable à bord, le bord W de X est une variété orientable; il existe en effet deux sortes de champs de vecteurs Y possibles, les champs sortants et les champs rentrants. De la même façon, si W est une sous-variété de dimension n 漣 1 de En , pour orienter W, il suffit de choisir un champ continu sur W qui en chaque point soit normal à W. C’est de cette façon que l’on oriente habituellement les surfaces de E3, par la règle du bonhomme d’Ampère. On remarquera d’ailleurs que, si un tel champ normal n’existe pas, la sous-variété n’est pas orientable; c’est ce qui se passe pour la bande de Möbius. Pour une surface dans E3, on montre que les trois conditions suivantes sont équivalentes:1. W est orientable;2. Il existe un champ continu normal à W;3. On peut distinguer les deux faces.3. TenseursFormes de degré 1Pour tout ce chapitre, nous renvoyons également à l’article calcul TENSORIEL.L’espace vectoriel face=F9796 des champs de vecteurs de classe 暈 秊 sur V est naturellement muni d’une structure de module sur l’anneau face=F9796 C 秊 des fonctions de classe 暈 秊. Une forme 諸 de degré 1 est une application face=F9796 C 秊-linéaire de face=F9796 dans face=F9796 C 秊, c’est-à-dire la donnée, pour tout champ X, d’une fonction 諸(X) de classe 暈 秊 de façon que l’on ait: Par exemple, si 﨏 est une fonction de classe 暈 秊, la correspondance X 料 X( 﨏 ) est une forme de degré 1. Si V est un ouvert de En , pour tout champ X de fonctions coordonnées (X1, ..., Xn ), on a:
Par exemple, si 﨏 est une fonction de classe 暈 秊, la correspondance X 料 X( 﨏 ) est une forme de degré 1. Si V est un ouvert de En , pour tout champ X de fonctions coordonnées (X1, ..., Xn ), on a: c’est pourquoi cette forme de degré 1 est appelée la différentielle de 﨏 et on la note d 﨏.Une forme de degré 1 définit en tout point m un élément du dual T(V)m de l’espace tangent T(V)m . On peut construire un fibré vectoriel de base V dont les fibres sont les espaces duaux T(V)m ; les formes de degré 1 sont alors les sections de classe 暈 秊 de ce fibré.Soit face=F9796 le face=F9796 C 秊-module des formes de degré 1; une application face=F9796 C 秊-multilinéaire 精 de (face=F9796 )p 憐 face=F9796 Fq dans face=F9796 C 秊 est appelée un tenseur de type (p , q ); c’est donc la donnée, pour toute famille ( 諸1, ..., 諸q ) de formes de degré 1 et pour toute famille (X1, ..., Xp ) de champs de vecteurs, d’une fonction:
c’est pourquoi cette forme de degré 1 est appelée la différentielle de 﨏 et on la note d 﨏.Une forme de degré 1 définit en tout point m un élément du dual T(V)m de l’espace tangent T(V)m . On peut construire un fibré vectoriel de base V dont les fibres sont les espaces duaux T(V)m ; les formes de degré 1 sont alors les sections de classe 暈 秊 de ce fibré.Soit face=F9796 le face=F9796 C 秊-module des formes de degré 1; une application face=F9796 C 秊-multilinéaire 精 de (face=F9796 )p 憐 face=F9796 Fq dans face=F9796 C 秊 est appelée un tenseur de type (p , q ); c’est donc la donnée, pour toute famille ( 諸1, ..., 諸q ) de formes de degré 1 et pour toute famille (X1, ..., Xp ) de champs de vecteurs, d’une fonction: de telle façon que les deux conditions suivantes soient satisfaites:1. Si l’on fixe les Xj et tous les 諸i sauf 諸i 0, on obtient une correspondance:
de telle façon que les deux conditions suivantes soient satisfaites:1. Si l’on fixe les Xj et tous les 諸i sauf 諸i 0, on obtient une correspondance: telle que:
telle que: 2. Si l’on fixe les 諸i et tous les Xj sauf Xj 0, on obtient une correspondance:
2. Si l’on fixe les 諸i et tous les Xj sauf Xj 0, on obtient une correspondance: telle que:
telle que: Les tenseurs de type (0,1) s’identifient aux champs de vecteurs de classe 暈 秊 et les tenseurs de type (1, 0) sont les formes de degré 1. On peut aussi définir les tenseurs de type (p , q ) comme sections d’un fibré vectoriel de base V, dont les fibres sont les produits tensoriels:
Les tenseurs de type (0,1) s’identifient aux champs de vecteurs de classe 暈 秊 et les tenseurs de type (1, 0) sont les formes de degré 1. On peut aussi définir les tenseurs de type (p , q ) comme sections d’un fibré vectoriel de base V, dont les fibres sont les produits tensoriels: Produit tensoriel
Produit tensoriel la fonction:
la fonction: on définit un tenseur de type (q + q , p + p ); c’est le produit tensoriel de 精 et de 精 , que l’on note 精 辰 精 .
on définit un tenseur de type (q + q , p + p ); c’est le produit tensoriel de 精 et de 精 , que l’on note 精 辰 精 . constituent une base du face=F9796 C 秊-module des champs de vecteurs; les différentielles:
constituent une base du face=F9796 C 秊-module des champs de vecteurs; les différentielles: des fonctions coordonnées constituent une base du face=F9796 C 秊-module des formes de degré 1. Les tenseurs de la forme:
des fonctions coordonnées constituent une base du face=F9796 C 秊-module des formes de degré 1. Les tenseurs de la forme: constituent une base du face=F9796 C 秊-module des tenseurs de type (p , q ); tout tenseur de type (p , q ) est donc défini par ses n p +q composantes dans cette base. Plus généralement, si (U, 﨏) est une carte d’une variété V, les champs (e 1, ..., e n ) se transportent en des champs (que l’on notera encore e 1, ..., e n ) qui constituent une base du face=F9796 C 秊-module des champs de vecteurs sur 﨏(U); de même, les fonctions coordonnées de 﨏-1: 﨏(U) où U 說 Rn ont des différentielles dx 1, ..., dxn qui constituent une base du face=F9796 C 秊-module des formes de degré 1; les tenseurs de la forme: 4. Formes différentiellesUne forme différentielle de degré p est un tenseur de type (0, p ) antisymétrique, c’est-à-dire tel que, quels que soient les champs (X1, ..., Xp ) et la permutation 靖 de1, ..., p, de signature 﨎( 靖), on ait:
constituent une base du face=F9796 C 秊-module des tenseurs de type (p , q ); tout tenseur de type (p , q ) est donc défini par ses n p +q composantes dans cette base. Plus généralement, si (U, 﨏) est une carte d’une variété V, les champs (e 1, ..., e n ) se transportent en des champs (que l’on notera encore e 1, ..., e n ) qui constituent une base du face=F9796 C 秊-module des champs de vecteurs sur 﨏(U); de même, les fonctions coordonnées de 﨏-1: 﨏(U) où U 說 Rn ont des différentielles dx 1, ..., dxn qui constituent une base du face=F9796 C 秊-module des formes de degré 1; les tenseurs de la forme: 4. Formes différentiellesUne forme différentielle de degré p est un tenseur de type (0, p ) antisymétrique, c’est-à-dire tel que, quels que soient les champs (X1, ..., Xp ) et la permutation 靖 de1, ..., p, de signature 﨎( 靖), on ait: Les formes différentielles de degré 1 sont les formes de degré 1 que l’on vient de définir au chapitre 3. Les formes de degré 2 sont les tenseurs de type (0, 2) tels que l’on ait 諸(X, Y) = 漣 諸(Y, X). Les formes de degré p constituent un module sur l’anneau face=F9796 C 秊; on le notera 廬p . On peut aussi considérer les formes différentielles de degré p comme les sections de classe 暈 秊 d’un fibré dont la fibre en m est la composante de degré p de l’algèbre extérieure du dual de l’espace tangent en m (cf. algèbre LINÉAIRE ET MULTILINÉAIRE, chap. 6). On en déduit que, pour p supérieur à la dimension de la variété, toute forme différentielle de degré p est nulle.Produit extérieurLe produit extérieur de la forme 諸 de degré p et de la forme 諸 de degré q est, par définition, la forme de degré p + q :
Les formes différentielles de degré 1 sont les formes de degré 1 que l’on vient de définir au chapitre 3. Les formes de degré 2 sont les tenseurs de type (0, 2) tels que l’on ait 諸(X, Y) = 漣 諸(Y, X). Les formes de degré p constituent un module sur l’anneau face=F9796 C 秊; on le notera 廬p . On peut aussi considérer les formes différentielles de degré p comme les sections de classe 暈 秊 d’un fibré dont la fibre en m est la composante de degré p de l’algèbre extérieure du dual de l’espace tangent en m (cf. algèbre LINÉAIRE ET MULTILINÉAIRE, chap. 6). On en déduit que, pour p supérieur à la dimension de la variété, toute forme différentielle de degré p est nulle.Produit extérieurLe produit extérieur de la forme 諸 de degré p et de la forme 諸 de degré q est, par définition, la forme de degré p + q : On sait que toute carte (U, 﨏) de la variété V de dimension n donne une base dx 1, ..., dxn du module 廬1( 﨏(U)) des formes différentielles de degré 1 définies sur 﨏(U). Pour p 礪 1, les formes de degré p qui s’écrivent:
On sait que toute carte (U, 﨏) de la variété V de dimension n donne une base dx 1, ..., dxn du module 廬1( 﨏(U)) des formes différentielles de degré 1 définies sur 﨏(U). Pour p 礪 1, les formes de degré p qui s’écrivent: avec 1 諒 i 1 麗 i 2 麗 ... 麗 i p 諒 n , constituent une base du module 廬p ( 﨏(U)) des formes différentielles de degré p définies sur 﨏(U); donc toute forme différentielle 諸 de degré p définie sur 﨏(U) s’écrit:
avec 1 諒 i 1 麗 i 2 麗 ... 麗 i p 諒 n , constituent une base du module 廬p ( 﨏(U)) des formes différentielles de degré p définies sur 﨏(U); donc toute forme différentielle 諸 de degré p définie sur 﨏(U) s’écrit: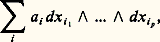 où les a i sont des fonctions de classe 暈 秊, la sommation étant faite sur l’ensemble des multi-indices i = (i 1, ..., i p ) tels que 1 諒 i 1 麗 ... 麗 i p 諒 n .
où les a i sont des fonctions de classe 暈 秊, la sommation étant faite sur l’ensemble des multi-indices i = (i 1, ..., i p ) tels que 1 諒 i 1 麗 ... 麗 i p 諒 n . définie sur 﨏(U) on associe la forme:
définie sur 﨏(U) on associe la forme: où Fi est la i -ième fonction coordonnée de l’application composée:
où Fi est la i -ième fonction coordonnée de l’application composée: Intégration des formes différentiellesSoit X une sous-variété compacte à bord de dimension n d’une variété V de dimension n (il se peut que le bord de X soit vide et même que X = V). Considérons une carte (U, 﨏) de V telle que:
Intégration des formes différentiellesSoit X une sous-variété compacte à bord de dimension n d’une variété V de dimension n (il se peut que le bord de X soit vide et même que X = V). Considérons une carte (U, 﨏) de V telle que: et une forme 諸 de degré n sur V, qui est nulle en dehors d’un compact K contenu dans 﨏(U). La forme 諸 s’écrit:
et une forme 諸 de degré n sur V, qui est nulle en dehors d’un compact K contenu dans 﨏(U). La forme 諸 s’écrit: si (U , 﨏 ) est une autre carte telle que 﨏 (U ) contienne K, la forme 諸 s’écrit également:
si (U , 﨏 ) est une autre carte telle que 﨏 (U ) contienne K, la forme 諸 s’écrit également: on voit facilement que, pour tout point M de K, 見 (M) est le produit de 見(M) par le déterminant de la différentielle de 﨏-1 獵 﨏 au point 﨏 -1(M). Il en résulte que l’on a:
on voit facilement que, pour tout point M de K, 見 (M) est le produit de 見(M) par le déterminant de la différentielle de 﨏-1 獵 﨏 au point 﨏 -1(M). Il en résulte que l’on a: c’est-à-dire que ces intégrales n -ièmes sont égales au signe près. Plus précisément, si K est connexe, le signe du déterminant de la différentielle de 﨏-1 獵 﨏 est constant sur K; s’il est positif, les deux intégrales sont égales et, s’il est négatif, elles sont opposées.Si V est orientée au voisinage de K, on peut décider de n’employer que des cartes compatibles avec cette orientation; alors la quantité:
c’est-à-dire que ces intégrales n -ièmes sont égales au signe près. Plus précisément, si K est connexe, le signe du déterminant de la différentielle de 﨏-1 獵 﨏 est constant sur K; s’il est positif, les deux intégrales sont égales et, s’il est négatif, elles sont opposées.Si V est orientée au voisinage de K, on peut décider de n’employer que des cartes compatibles avec cette orientation; alors la quantité: est indépendante de la carte choisie; on l’appelle l’intégrale de 諸 sur X et on utilise la notation 咽X 諸.Soit maintenant une forme quelconque 諸 de degré n sur V et soit (Ui , 﨏i ), avec i 捻 I, une famille finie de cartes de V dont les images recouvrent X. On peut montrer qu’il existe une famille de fonctions numériques (f i ), avec i 捻 I, telle que, pour tout i , la fonction f i soit nulle en dehors d’un compact Ki contenu dans 﨏i (Ui ) et que, pour tout point M de X, on ait:
est indépendante de la carte choisie; on l’appelle l’intégrale de 諸 sur X et on utilise la notation 咽X 諸.Soit maintenant une forme quelconque 諸 de degré n sur V et soit (Ui , 﨏i ), avec i 捻 I, une famille finie de cartes de V dont les images recouvrent X. On peut montrer qu’il existe une famille de fonctions numériques (f i ), avec i 捻 I, telle que, pour tout i , la fonction f i soit nulle en dehors d’un compact Ki contenu dans 﨏i (Ui ) et que, pour tout point M de X, on ait: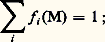 une telle famille de fonctions est appelée une partition de l’unité au-dessus de X, relative au recouvrement ( 﨏i (Ui )), avec i 捻 I. Pour tout i , on a déjà défini:
une telle famille de fonctions est appelée une partition de l’unité au-dessus de X, relative au recouvrement ( 﨏i (Ui )), avec i 捻 I. Pour tout i , on a déjà défini: puisque f i 諸 est nulle en dehors de Ki ; on pose alors:
puisque f i 諸 est nulle en dehors de Ki ; on pose alors: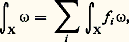 ce qui définit l’intégrale sur X de la forme 諸.Formules de StokesÀ toute forme 諸 de degré p on associe une forme d 諸, de telle façon que l’on ait:
ce qui définit l’intégrale sur X de la forme 諸.Formules de StokesÀ toute forme 諸 de degré p on associe une forme d 諸, de telle façon que l’on ait: La forme d 諸 est appelée la dérivée extérieure de 諸; il est clair que, si, au-dessus de 﨏(U), on a:
La forme d 諸 est appelée la dérivée extérieure de 諸; il est clair que, si, au-dessus de 﨏(U), on a: alors on a:
alors on a: On voit que le degré de d 諸 est supérieur d’une unité à celui de 諸.Pour toute sous-variété Y orientée de la variété V et pour toute forme 諸 sur V dont le degré est égal à la dimension de Y, l’intégrale:
On voit que le degré de d 諸 est supérieur d’une unité à celui de 諸.Pour toute sous-variété Y orientée de la variété V et pour toute forme 諸 sur V dont le degré est égal à la dimension de Y, l’intégrale: où i est l’injection de Y dans V et i ( 諸) l’image directe de 諸 par i , est appelée l’intégrale de 諸 sur Y. La formule de Stokes s’écrit alors de la façon suivante: soit Y une sous-variété orientée de dimension p de V et soit d Y le bord de Y; pour toute forme 諸 de degré p 漣 1 sur V, on a:
où i est l’injection de Y dans V et i ( 諸) l’image directe de 諸 par i , est appelée l’intégrale de 諸 sur Y. La formule de Stokes s’écrit alors de la façon suivante: soit Y une sous-variété orientée de dimension p de V et soit d Y le bord de Y; pour toute forme 諸 de degré p 漣 1 sur V, on a: Le signe des deux membres de cette égalité dépend des orientations choisies sur Y et d Y; elle ne peut donc être vraie que si ces orientations sont correctement reliées entre elles. Avec les définitions que l’on a données, il faut que, si (X1, ..., Xn -1) est une base orientée de T(d Y)M et si Xn est un vecteur sortant au point M, les vecteurs (X1, ..., Xn ) soient une base orientée de T(Y)M.Formes différentielles sur E3Le plus souvent, quand on travaille avec la variété E3, on munit ses espaces tangents du produit scalaire habituel. Alors, à tout champ de vecteurs X on associe une forme 諸X de degré 1, en posant, pour tout champ Y et pour tout point m ,
Le signe des deux membres de cette égalité dépend des orientations choisies sur Y et d Y; elle ne peut donc être vraie que si ces orientations sont correctement reliées entre elles. Avec les définitions que l’on a données, il faut que, si (X1, ..., Xn -1) est une base orientée de T(d Y)M et si Xn est un vecteur sortant au point M, les vecteurs (X1, ..., Xn ) soient une base orientée de T(Y)M.Formes différentielles sur E3Le plus souvent, quand on travaille avec la variété E3, on munit ses espaces tangents du produit scalaire habituel. Alors, à tout champ de vecteurs X on associe une forme 諸X de degré 1, en posant, pour tout champ Y et pour tout point m , produit scalaire des deux vecteurs X(m ) et Y(m ). Cette correspondance est bijective, si bien que, inversement, à toute forme de degré 1 correspond un champ de vecteurs.De même, à tout champ X on associe une forme 精X de degré 2, en posant, pour tout point m .
produit scalaire des deux vecteurs X(m ) et Y(m ). Cette correspondance est bijective, si bien que, inversement, à toute forme de degré 1 correspond un champ de vecteurs.De même, à tout champ X on associe une forme 精X de degré 2, en posant, pour tout point m . où 廬 désigne le produit vectoriel usuel sur E3. Cette correspondance est également bijective. On voit alors facilement que le rotationnel du champ T est le champ X tel que 精X soit la dérivée de la forme 諸T. De même, la divergence de X correspond à la différentielle de la forme 精X (cf. calcul TENSORIEL et CALCUL INFINITÉSIMAL -Calcul à plusieurs variables, chap. 1). C’est ainsi que, si df est la différentielle d’une fonction différentielle f , il lui correspond le vecteur gradient de f , dont les composantes sur la base canonique sont:
où 廬 désigne le produit vectoriel usuel sur E3. Cette correspondance est également bijective. On voit alors facilement que le rotationnel du champ T est le champ X tel que 精X soit la dérivée de la forme 諸T. De même, la divergence de X correspond à la différentielle de la forme 精X (cf. calcul TENSORIEL et CALCUL INFINITÉSIMAL -Calcul à plusieurs variables, chap. 1). C’est ainsi que, si df est la différentielle d’une fonction différentielle f , il lui correspond le vecteur gradient de f , dont les composantes sur la base canonique sont: avec:
avec: 5. Théorème de FrobeniusDonnons-nous en chaque point M d’une variété V de dimension n un sous-espace vectoriel SM de dimension p de T(V)M; on suppose, bien entendu, que les SM varient différentiablement avec M; un tel système de sous-espaces vectoriels est appelé un système de Pfaff . Une intégrale du système de Pfaff S est un morceau de sous-variété de dimension p de V, qui, en chacun de ses points M, a pour espace tangent le sous-espace vectoriel SM. On dit que S est complètement intégrable si tout point de V est contenu dans une intégrale de S.Soit X et Y deux champs de vecteurs; la correspondance qui à toute fonction f associe X(Y(f )) n’est pas un champ de vecteurs; en effet, son expression dans une carte fait intervenir les dérivées partielles secondes de la fonction f . Au contraire, la correspondance:
5. Théorème de FrobeniusDonnons-nous en chaque point M d’une variété V de dimension n un sous-espace vectoriel SM de dimension p de T(V)M; on suppose, bien entendu, que les SM varient différentiablement avec M; un tel système de sous-espaces vectoriels est appelé un système de Pfaff . Une intégrale du système de Pfaff S est un morceau de sous-variété de dimension p de V, qui, en chacun de ses points M, a pour espace tangent le sous-espace vectoriel SM. On dit que S est complètement intégrable si tout point de V est contenu dans une intégrale de S.Soit X et Y deux champs de vecteurs; la correspondance qui à toute fonction f associe X(Y(f )) n’est pas un champ de vecteurs; en effet, son expression dans une carte fait intervenir les dérivées partielles secondes de la fonction f . Au contraire, la correspondance: est un champ de vecteurs, appelé le crochet de X et de Y. On pourra trouver des précisions sur cette construction au chapitre 1 de l’article équations aux DÉRIVÉS PARTIELLES.On dit que le champ X appartient au système de Pfaff S si, en tout point M de V, le vecteur X(M) est dans le sous-espace SM de T(V)M. Le théorème de Frobenius peut alors s’écrire de la façon suivante: un système de Pfaff S est complètement intégrable si et seulement si, pour tout couple (X, Y) de champs qui appartiennent à S, le crochet [X, Y] appartient à S.Par exemple, tout système de Pfaff de dimension 1 (c’est-à-dire où SM est de dimension 1, quel que soit M) est complètement intégrable. C’était évident a priori, puisqu’un tel système peut être localement défini par un champ de vecteurs X qui ne s’annule jamais et que les courbes intégrales de l’équation:
est un champ de vecteurs, appelé le crochet de X et de Y. On pourra trouver des précisions sur cette construction au chapitre 1 de l’article équations aux DÉRIVÉS PARTIELLES.On dit que le champ X appartient au système de Pfaff S si, en tout point M de V, le vecteur X(M) est dans le sous-espace SM de T(V)M. Le théorème de Frobenius peut alors s’écrire de la façon suivante: un système de Pfaff S est complètement intégrable si et seulement si, pour tout couple (X, Y) de champs qui appartiennent à S, le crochet [X, Y] appartient à S.Par exemple, tout système de Pfaff de dimension 1 (c’est-à-dire où SM est de dimension 1, quel que soit M) est complètement intégrable. C’était évident a priori, puisqu’un tel système peut être localement défini par un champ de vecteurs X qui ne s’annule jamais et que les courbes intégrales de l’équation: sont des intégrales de S.Au contraire, les systèmes de Pfaff de dimension p 礪 1 ne sont en général pas complètement intégrables.L’étude locale des systèmes de Pfaff étant ainsi complètement terminée, il reste à déterminer l’allure de leurs intégrales maximales, ce qui est l’objet de la théorie des feuilletages (cf. TOPOLOGIE - Topologie différentielle).6. Variétés riemanniennesStructures riemanniennesUne structure riemannienne sur une variété V est la donnée d’une structure euclidienne sur chacun de ses espaces tangents. Donc, sur une variété riemannienne, si t et t sont deux vecteurs tangents au même point m , on peut parler de leur produit scalaire, de leurs longueurs et de leur angle. Bien entendu, pour qu’une telle donnée soit utilisable, il faut que, pour tout couple (X, Y) de champs de vecteurs de classe 暈 秊, la fonction qui à tout point m associe le produit scalaire de X(m ) et de Y(m ) soit de classe 暈 秊.Il en résulte qu’une structure riemannienne est donnée par un tenseur 精 de type (2, 0) symétrique (c’est-à-dire un tenseur tel que 精(X, Y) = 精(Y, X)) qui vérifie les deux conditions suivantes:Plus généralement, on peut considérer sur une variété V un tenseur 精 de type (2, 0) symétrique tel que, pour tout point m de V, l’application 精m soit une forme bilinéaire symétrique non dégénérée sur l’espace tangent en m à V; un tel tenseur est appelé une structure pseudo-riemannienne sur V. On démontre que la signature de 精m est constante sur chaque composante connexe de V.On sait que chacun des espaces tangents à En est, de manière naturelle, identifié à Rn . Il en résulte que, si l’on choisit un produit scalaire sur Rn , alors E, est muni d’une structure riemannienne; en général, on prendra sur Rn le produit scalaire:
sont des intégrales de S.Au contraire, les systèmes de Pfaff de dimension p 礪 1 ne sont en général pas complètement intégrables.L’étude locale des systèmes de Pfaff étant ainsi complètement terminée, il reste à déterminer l’allure de leurs intégrales maximales, ce qui est l’objet de la théorie des feuilletages (cf. TOPOLOGIE - Topologie différentielle).6. Variétés riemanniennesStructures riemanniennesUne structure riemannienne sur une variété V est la donnée d’une structure euclidienne sur chacun de ses espaces tangents. Donc, sur une variété riemannienne, si t et t sont deux vecteurs tangents au même point m , on peut parler de leur produit scalaire, de leurs longueurs et de leur angle. Bien entendu, pour qu’une telle donnée soit utilisable, il faut que, pour tout couple (X, Y) de champs de vecteurs de classe 暈 秊, la fonction qui à tout point m associe le produit scalaire de X(m ) et de Y(m ) soit de classe 暈 秊.Il en résulte qu’une structure riemannienne est donnée par un tenseur 精 de type (2, 0) symétrique (c’est-à-dire un tenseur tel que 精(X, Y) = 精(Y, X)) qui vérifie les deux conditions suivantes:Plus généralement, on peut considérer sur une variété V un tenseur 精 de type (2, 0) symétrique tel que, pour tout point m de V, l’application 精m soit une forme bilinéaire symétrique non dégénérée sur l’espace tangent en m à V; un tel tenseur est appelé une structure pseudo-riemannienne sur V. On démontre que la signature de 精m est constante sur chaque composante connexe de V.On sait que chacun des espaces tangents à En est, de manière naturelle, identifié à Rn . Il en résulte que, si l’on choisit un produit scalaire sur Rn , alors E, est muni d’une structure riemannienne; en général, on prendra sur Rn le produit scalaire: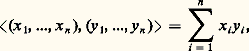 ce qui donne ainsi une structure riemannienne naturelle sur En . Si maintenant V est une sous-variété de En , l’espace tangent à V en m est un sous-espace vectoriel de l’espace tangent à En en m et il en résulte qu’il est muni d’une structure euclidienne induite; donc toute sous-variété de En est munie naturellement d’une structure riemannienne. Puisque toute variété qui est réunion dénombrable de compacts est difféomorphe à une sous-variété d’un espace En , elle possède au moins une structure riemannienne. Inversement, il n’existe pas toujours sur une variété V une structure pseudo-riemannienne ayant une signature donnée.On va voir que les structures riemanniennes permettent de généraliser les constructions classiques (géodésiques, aires, courbure, etc.) que l’on sait faire sur les surfaces de E3 [cf. GÉOMÉTRIE DIFFÉRENTIELLE CLASSIQUE].Les variétés pseudo-riemanniennes ont des propriétés moins simples; elles sont pourtant d’une grande importance en physique théorique, puisque la mécanique relativiste se définit essentiellement comme l’étude d’une variété pseudo-riemannienne de dimension 4 de signature (+, +, +, 漣).Distance géodésiqueOn appellera courbe de classe 暈1 par morceaux tracée sur la variété V une application:
ce qui donne ainsi une structure riemannienne naturelle sur En . Si maintenant V est une sous-variété de En , l’espace tangent à V en m est un sous-espace vectoriel de l’espace tangent à En en m et il en résulte qu’il est muni d’une structure euclidienne induite; donc toute sous-variété de En est munie naturellement d’une structure riemannienne. Puisque toute variété qui est réunion dénombrable de compacts est difféomorphe à une sous-variété d’un espace En , elle possède au moins une structure riemannienne. Inversement, il n’existe pas toujours sur une variété V une structure pseudo-riemannienne ayant une signature donnée.On va voir que les structures riemanniennes permettent de généraliser les constructions classiques (géodésiques, aires, courbure, etc.) que l’on sait faire sur les surfaces de E3 [cf. GÉOMÉTRIE DIFFÉRENTIELLE CLASSIQUE].Les variétés pseudo-riemanniennes ont des propriétés moins simples; elles sont pourtant d’une grande importance en physique théorique, puisque la mécanique relativiste se définit essentiellement comme l’étude d’une variété pseudo-riemannienne de dimension 4 de signature (+, +, +, 漣).Distance géodésiqueOn appellera courbe de classe 暈1 par morceaux tracée sur la variété V une application: pour laquelle il existe une suite finie a = t 0 麗 t 1 麗 ... 麗 t q = b telle que 塚 soit de classe 暈1 sur chacun des segments [t i , t i +1]. Si V est une variété riemannienne, on définit la longueur de la courbe 塚 comme étant le scalaire positif:
pour laquelle il existe une suite finie a = t 0 麗 t 1 麗 ... 麗 t q = b telle que 塚 soit de classe 暈1 sur chacun des segments [t i , t i +1]. Si V est une variété riemannienne, on définit la longueur de la courbe 塚 comme étant le scalaire positif: où 麗 塚 (t ), 塚 (t ) 礪 est le carré scalaire du vecteur vitesse de 塚 à l’instant t . Cette définition généralise la définition classique de la longueur d’une courbe du plan ou de l’espace [cf. GÉOMÉTRIE DIFFÉRENTIELLE CLASSIQUE].Pour tout couple (A, B) de points de V, notons d (A, B) la borne inférieure des longueurs des courbes de classe 暈1 par morceaux qui joignent A à B. Il est évident que d (A, B) 閭 0, que d (A, B) = d (B, A) et que d (A, B) + d (B, C) 閭 d (A, C); on démontre que d (A, B) = 0 équivaut à A = B; donc d est une distance sur la variété V (cf. espaces MÉTRIQUES); la topologie déduite de cette distance coïncide avec la topologie donnée sur V. Cette distance est appelée la distance géodésique .Les géodésiquesÉtant donné deux points A et B de la variété riemannienne V, on peut se demander s’il existe une courbe joignant A à B telle que l ( 塚) = d (A, B). Si 塚 est une telle courbe et si A et B sont deux points de 塚, l’arc de 塚 compris entre A et B a pour longueur d (A , B ); sinon, en recollant les arcs de 塚 (joignant A à A et B à B ) à une courbe 塚 joignant A et B et qui est plus courte que cet arc, on obtiendrait une courbe (fig. 3) joignant A à B de longueur plus petite que d (A, B).On voit ainsi que, pour qu’une courbe joignant A à B soit de longueur d (A, B), il faut qu’elle vérifie une certaine condition locale (qui n’est d’ailleurs pas suffisante). Cette condition s’exprime par une équation différentielle du second ordre. Les courbes qui la vérifient sont de classe 暈 秊; on appelle géodésiques de V les courbes maximales qui vérifient cette équation différentielle.On montre que, par deux points A et B suffisamment voisins, il passe un arc de géodésique et un seul dont la longueur est d (A, B); mais il peut en passer d’autres qui soient plus longs: voir Les géométries non euclidiennes ci-dessous.VolumeLa donnée d’une structure euclidienne sur T(V)m donne sur cet espace une classe de bases privilégiées: les bases orthonormales. Si B et B sont deux telles bases, le déterminant de la matrice de passage est égal à + 1 ou à 漣 1. Si l’on choisit une orientation, le déterminant de la matrice de passage entre deux bases orthonormales orientées est + 1; donc il existe une forme n -linéaire alternée, où n = dim V, et une seule qui vaut + 1 sur les bases orthonormées orientées. Donc, sur une variété orientée, une structure riemannienne définit une forme différentielle de degré n . C’est la forme volume v. En associant à tout compact K de V l’intégrale 咽Kv, on définit une mesure sur V. Le nombre 咽Kv est appelé le volume de K. Si V n’est pas orientée, la forme volume n’existe plus (en chaque point, elle n’est définie qu’au signe près), mais la mesure associée est encore définie.On a vu que toute surface régulière V de E3 est munie d’une structure riemannienne naturelle; si elle est compacte, son volume est égal à sa surface au sens banal. De façon analogue, toute sous-variété de dimension k d’une variété riemannienne a un volume k -dimensionnel. Si cette variété est une courbe, son volume 1-dimensionnel est sa longueur telle qu’on la précédemment définie (cf. supra , Distance géodésique ).Les géométries non euclidiennesLes géométries non euclidiennes sont l’un des exemples les plus classiques et les plus importants de variétés riemanniennes. Rappelons la construction des géométries de dimension 2 en donnant quelques exemples.Considérons un mathématicien qui veut récrire la géométrie élémentaire en observant une variété riemannienne V de dimension 2. Il est en présence d’un ensemble de points et il peut mesurer la longueur des courbes. Il va d’abord étudier les courbes qui sont «le plus court chemin d’un point à un autre»: ce sont les géodésiques de V; pour Euclide, c’étaient les droites. Alors se pose le problème du parallélisme: Étant donné une géodésique D et un point M non situé sur D, combien existe-t-il de géodésiques D passant par M et ne rencontrant pas D, «même si l’on prolonge D et D indéfiniment»? Euclide avait postulé qu’il en existe une et une seule. C’est ce qui se passe si V est le plan R2 muni de sa structure riémannienne naturelle, puisque les géodésiques sont alors les droites. On va voir sur des exemples que c’est en général faux.Géométrie de la sphère de RiemannSoit S2 la sphère de dimension 2 centrée à l’origine de E3 et de rayon r , munie de sa structure riemannienne naturelle induite par celle de E3. Les géodésiques sont les grands cercles. Par deux points A et B non diamétralement opposés, il passe donc une géodésique et une seule; mais il existe deux arcs de géodésiques d’extrémités A et B, l’un est de longueur d (A, B), l’autre est plus long. Si les deux points A et B sont diamétralement opposés, il existe une infinité d’arcs de géodésiques d’extrémités A et B, chacun d’eux étant de longueur d (A, B). Il n’y a pas de géodésiques parallèles ici, puisque deux géodésiques quelconques se rencontrent toujours en deux points (fig. 4).Géométrie de LobatchevskiSoit 神 le demi-plan ouvert de E2 défini par y 礪 0; on en fait une variété riemannienne de dimension 2 en décidant que le produit scalaire des vecteurs X = ( 見, 廓) et Y = ( 見 , 廓 ) tangents au point M = (x , y ) de 神 est:
où 麗 塚 (t ), 塚 (t ) 礪 est le carré scalaire du vecteur vitesse de 塚 à l’instant t . Cette définition généralise la définition classique de la longueur d’une courbe du plan ou de l’espace [cf. GÉOMÉTRIE DIFFÉRENTIELLE CLASSIQUE].Pour tout couple (A, B) de points de V, notons d (A, B) la borne inférieure des longueurs des courbes de classe 暈1 par morceaux qui joignent A à B. Il est évident que d (A, B) 閭 0, que d (A, B) = d (B, A) et que d (A, B) + d (B, C) 閭 d (A, C); on démontre que d (A, B) = 0 équivaut à A = B; donc d est une distance sur la variété V (cf. espaces MÉTRIQUES); la topologie déduite de cette distance coïncide avec la topologie donnée sur V. Cette distance est appelée la distance géodésique .Les géodésiquesÉtant donné deux points A et B de la variété riemannienne V, on peut se demander s’il existe une courbe joignant A à B telle que l ( 塚) = d (A, B). Si 塚 est une telle courbe et si A et B sont deux points de 塚, l’arc de 塚 compris entre A et B a pour longueur d (A , B ); sinon, en recollant les arcs de 塚 (joignant A à A et B à B ) à une courbe 塚 joignant A et B et qui est plus courte que cet arc, on obtiendrait une courbe (fig. 3) joignant A à B de longueur plus petite que d (A, B).On voit ainsi que, pour qu’une courbe joignant A à B soit de longueur d (A, B), il faut qu’elle vérifie une certaine condition locale (qui n’est d’ailleurs pas suffisante). Cette condition s’exprime par une équation différentielle du second ordre. Les courbes qui la vérifient sont de classe 暈 秊; on appelle géodésiques de V les courbes maximales qui vérifient cette équation différentielle.On montre que, par deux points A et B suffisamment voisins, il passe un arc de géodésique et un seul dont la longueur est d (A, B); mais il peut en passer d’autres qui soient plus longs: voir Les géométries non euclidiennes ci-dessous.VolumeLa donnée d’une structure euclidienne sur T(V)m donne sur cet espace une classe de bases privilégiées: les bases orthonormales. Si B et B sont deux telles bases, le déterminant de la matrice de passage est égal à + 1 ou à 漣 1. Si l’on choisit une orientation, le déterminant de la matrice de passage entre deux bases orthonormales orientées est + 1; donc il existe une forme n -linéaire alternée, où n = dim V, et une seule qui vaut + 1 sur les bases orthonormées orientées. Donc, sur une variété orientée, une structure riemannienne définit une forme différentielle de degré n . C’est la forme volume v. En associant à tout compact K de V l’intégrale 咽Kv, on définit une mesure sur V. Le nombre 咽Kv est appelé le volume de K. Si V n’est pas orientée, la forme volume n’existe plus (en chaque point, elle n’est définie qu’au signe près), mais la mesure associée est encore définie.On a vu que toute surface régulière V de E3 est munie d’une structure riemannienne naturelle; si elle est compacte, son volume est égal à sa surface au sens banal. De façon analogue, toute sous-variété de dimension k d’une variété riemannienne a un volume k -dimensionnel. Si cette variété est une courbe, son volume 1-dimensionnel est sa longueur telle qu’on la précédemment définie (cf. supra , Distance géodésique ).Les géométries non euclidiennesLes géométries non euclidiennes sont l’un des exemples les plus classiques et les plus importants de variétés riemanniennes. Rappelons la construction des géométries de dimension 2 en donnant quelques exemples.Considérons un mathématicien qui veut récrire la géométrie élémentaire en observant une variété riemannienne V de dimension 2. Il est en présence d’un ensemble de points et il peut mesurer la longueur des courbes. Il va d’abord étudier les courbes qui sont «le plus court chemin d’un point à un autre»: ce sont les géodésiques de V; pour Euclide, c’étaient les droites. Alors se pose le problème du parallélisme: Étant donné une géodésique D et un point M non situé sur D, combien existe-t-il de géodésiques D passant par M et ne rencontrant pas D, «même si l’on prolonge D et D indéfiniment»? Euclide avait postulé qu’il en existe une et une seule. C’est ce qui se passe si V est le plan R2 muni de sa structure riémannienne naturelle, puisque les géodésiques sont alors les droites. On va voir sur des exemples que c’est en général faux.Géométrie de la sphère de RiemannSoit S2 la sphère de dimension 2 centrée à l’origine de E3 et de rayon r , munie de sa structure riemannienne naturelle induite par celle de E3. Les géodésiques sont les grands cercles. Par deux points A et B non diamétralement opposés, il passe donc une géodésique et une seule; mais il existe deux arcs de géodésiques d’extrémités A et B, l’un est de longueur d (A, B), l’autre est plus long. Si les deux points A et B sont diamétralement opposés, il existe une infinité d’arcs de géodésiques d’extrémités A et B, chacun d’eux étant de longueur d (A, B). Il n’y a pas de géodésiques parallèles ici, puisque deux géodésiques quelconques se rencontrent toujours en deux points (fig. 4).Géométrie de LobatchevskiSoit 神 le demi-plan ouvert de E2 défini par y 礪 0; on en fait une variété riemannienne de dimension 2 en décidant que le produit scalaire des vecteurs X = ( 見, 廓) et Y = ( 見 , 廓 ) tangents au point M = (x , y ) de 神 est: on démontre que les géodésiques sont, d’une part, les demi-droites parallèles à Oy et, d’autre part, les demi-cercles centrés sur Ox . On voit donc que, par deux points A et B, il passe toujours une géodésique et une seule, comme dans la géométrie d’Euclide; il existe un arc de géodésique et un seul d’extrémités A et B et il est de longueur d (A, B). Mais, si D est une géodésique et M un point non situé sur D, il existe une infinité de géodésiques passant par M et ne rencontrant pas D; on peut en quelque sorte tracer une infinité de parallèles à D qui passent par M (fig. 5).Géométrie elliptiqueOn obtient une application g de S2 sur le plan projectif P2(R) en associant à tout point M de la sphère la droite qui joint M à l’origine. Pour tout point m de P2(R), l’ensemble g -1(m ) est formé de deux points M1 et M2 diamétralement opposés sur S2. Les applications linéaires tangentes à g en M1 et M2 sont des isomorphismes:
on démontre que les géodésiques sont, d’une part, les demi-droites parallèles à Oy et, d’autre part, les demi-cercles centrés sur Ox . On voit donc que, par deux points A et B, il passe toujours une géodésique et une seule, comme dans la géométrie d’Euclide; il existe un arc de géodésique et un seul d’extrémités A et B et il est de longueur d (A, B). Mais, si D est une géodésique et M un point non situé sur D, il existe une infinité de géodésiques passant par M et ne rencontrant pas D; on peut en quelque sorte tracer une infinité de parallèles à D qui passent par M (fig. 5).Géométrie elliptiqueOn obtient une application g de S2 sur le plan projectif P2(R) en associant à tout point M de la sphère la droite qui joint M à l’origine. Pour tout point m de P2(R), l’ensemble g -1(m ) est formé de deux points M1 et M2 diamétralement opposés sur S2. Les applications linéaires tangentes à g en M1 et M2 sont des isomorphismes: On définit une structure euclidienne sur T(P2(R))m en prenant l’image de celle de T(S2)M1 par 1, ou celle de T(S2)M2 par 2 puisque c’est la même.En faisant cette construction pour tout point m de P2(R), on obtient une structure riemannienne sur P2(R). Les géodésiques sont les images des grands cercles de S2. Par deux points A et B, il passe toujours une géodésique et une seule, comme dans la géométrie d’Euclide; mais il existe deux arcs de géodésique d’extrémités A et B: l’un est de longueur d (A, B), l’autre est en général plus long. Il n’y a pas de parallèles puisque deux géodésiques quelconques ont un point en commun. Tout point de cette variété possède un voisinage isomorphe (avec sa structure riemannienne) à un ouvert de la sphère de Riemann; donc un observateur placé sur l’une de ces deux variétés, et qui ne peut donc nécessairement explorer qu’un domaine restreint autour de son point de départ, ne peut pas savoir sur laquelle il se trouve.On peut pousser plus avant l’étude géométrique de ces variétés. On peut, par exemple, définir les cercles: sur la sphère de Riemann, la distance entre deux points est au plus 神r ; donc l’étude des cercles réserve quelques surprises.On peut aussi étudier les triangles. La somme des angles d’un triangle n’est plus égale à 神 comme dans la géométrie d’Euclide: sur la sphère de Riemann, elle est égale à 神 + A/r 2, où A est l’aire du triangle; sur le demi-plan de Lobatchevski, elle est égale à 神 漣 A.7. ConnexionsLes connexions linéairesQuel que soit le point M de En , l’espace T(En )M est identifié de manière naturelle à T(En )0 = Rn ; il en résulte que, si l’on a choisi une base B0 de Rn , tous les espaces tangents à En sont munis d’une base naturelle BM. On peut se demander si, pour toute variété V, on peut ainsi choisir, pour tout point M de V, une base BM de T(V)M, qui «varie continûment avec M». Un tel choix est possible localement: il suffit de se donner une carte locale; mais il ne l’est pas toujours sur toute la variété. En utilisant les notations de l’article TOPOLOGIE - Topologie algébrique, au chapitre 4, on voit que ce choix est possible si et seulement si le fibré tangent T(V) est trivial, ce qui n’est pas le cas pour S2, pour P2(R) ni pour P3(R). À défaut d’une telle famille de bases, on va chercher un processus qui permette de faire varier une base continûment le long de n’importe quelle courbe différentiable tracée sur la variété. Un tel processus est donné par une connexion linéaire.Une connexion linéaire est la donnée, pour tout couple (X, Y) de champs de vecteurs de classe 暈 秊, d’un champ de vecteurs 暴X Y de classe 暈 秊 de façon que les deux propriétés suivantes soient vérifiées:
On définit une structure euclidienne sur T(P2(R))m en prenant l’image de celle de T(S2)M1 par 1, ou celle de T(S2)M2 par 2 puisque c’est la même.En faisant cette construction pour tout point m de P2(R), on obtient une structure riemannienne sur P2(R). Les géodésiques sont les images des grands cercles de S2. Par deux points A et B, il passe toujours une géodésique et une seule, comme dans la géométrie d’Euclide; mais il existe deux arcs de géodésique d’extrémités A et B: l’un est de longueur d (A, B), l’autre est en général plus long. Il n’y a pas de parallèles puisque deux géodésiques quelconques ont un point en commun. Tout point de cette variété possède un voisinage isomorphe (avec sa structure riemannienne) à un ouvert de la sphère de Riemann; donc un observateur placé sur l’une de ces deux variétés, et qui ne peut donc nécessairement explorer qu’un domaine restreint autour de son point de départ, ne peut pas savoir sur laquelle il se trouve.On peut pousser plus avant l’étude géométrique de ces variétés. On peut, par exemple, définir les cercles: sur la sphère de Riemann, la distance entre deux points est au plus 神r ; donc l’étude des cercles réserve quelques surprises.On peut aussi étudier les triangles. La somme des angles d’un triangle n’est plus égale à 神 comme dans la géométrie d’Euclide: sur la sphère de Riemann, elle est égale à 神 + A/r 2, où A est l’aire du triangle; sur le demi-plan de Lobatchevski, elle est égale à 神 漣 A.7. ConnexionsLes connexions linéairesQuel que soit le point M de En , l’espace T(En )M est identifié de manière naturelle à T(En )0 = Rn ; il en résulte que, si l’on a choisi une base B0 de Rn , tous les espaces tangents à En sont munis d’une base naturelle BM. On peut se demander si, pour toute variété V, on peut ainsi choisir, pour tout point M de V, une base BM de T(V)M, qui «varie continûment avec M». Un tel choix est possible localement: il suffit de se donner une carte locale; mais il ne l’est pas toujours sur toute la variété. En utilisant les notations de l’article TOPOLOGIE - Topologie algébrique, au chapitre 4, on voit que ce choix est possible si et seulement si le fibré tangent T(V) est trivial, ce qui n’est pas le cas pour S2, pour P2(R) ni pour P3(R). À défaut d’une telle famille de bases, on va chercher un processus qui permette de faire varier une base continûment le long de n’importe quelle courbe différentiable tracée sur la variété. Un tel processus est donné par une connexion linéaire.Une connexion linéaire est la donnée, pour tout couple (X, Y) de champs de vecteurs de classe 暈 秊, d’un champ de vecteurs 暴X Y de classe 暈 秊 de façon que les deux propriétés suivantes soient vérifiées: X, X , Y et Y étant des champs de classe 暈 秊 et f une fonction de classe 暈 秊 quelconques.La connexion linéaire 暴 étant donnée sur la variété V, considérons une courbe régulière:
X, X , Y et Y étant des champs de classe 暈 秊 et f une fonction de classe 暈 秊 quelconques.La connexion linéaire 暴 étant donnée sur la variété V, considérons une courbe régulière: et, pour tout t 捻 [ 見, 廓], un vecteur Y(t ) tangent à V en 塚(t ); on suppose bien sûr que Y(t ) varie de façon 暈 秊 par rapport à t . Soit, d’autre part, X 黎 et Y 黎 des champs de vecteurs tels que, pour tout t , on ait X 黎( 塚(t )) = X 黎(t ) et Y 黎( 塚(t )) = Y(t ). Alors la restriction de 暴 size=1お Y 黎 à la courbe ne dépend pas du choix de X 黎 et Y 黎, mais seulement de Y et de la courbe; par abus de langage, on la note 暴 size=1塚 size=1(t )Y. Si 暴 size=1塚 size=1(t )Y est identiquement nul, on dit que le vecteur Y(t ) se transporte de façon équipollente le long de 塚. Étant donné un vecteur y tangent à V en 塚( 見), il existe une famille Y(t ) et une seule qui se transporte de façon équipollente le long de 塚 et telle que Y( 見) = y . Si l’on a dim V = n et si (y 1, ..., y n ) est une base de T(V) size=1塚( size=1見), on obtient, par transport équipollent, n familles Y1(t ), ..., Yn (t ) qui, pour tout t , définissent une base de T(V) size=1塚(t ). S’il existe une fonction 﨏 telle que le vecteur Z(t ) = 﨏(t )Y(t ) se transporte de façon équipollente, on dit que Y se transporte parallèlement ; il revient au même de dire qu’il existe une fonction 﨏 telle que:
et, pour tout t 捻 [ 見, 廓], un vecteur Y(t ) tangent à V en 塚(t ); on suppose bien sûr que Y(t ) varie de façon 暈 秊 par rapport à t . Soit, d’autre part, X 黎 et Y 黎 des champs de vecteurs tels que, pour tout t , on ait X 黎( 塚(t )) = X 黎(t ) et Y 黎( 塚(t )) = Y(t ). Alors la restriction de 暴 size=1お Y 黎 à la courbe ne dépend pas du choix de X 黎 et Y 黎, mais seulement de Y et de la courbe; par abus de langage, on la note 暴 size=1塚 size=1(t )Y. Si 暴 size=1塚 size=1(t )Y est identiquement nul, on dit que le vecteur Y(t ) se transporte de façon équipollente le long de 塚. Étant donné un vecteur y tangent à V en 塚( 見), il existe une famille Y(t ) et une seule qui se transporte de façon équipollente le long de 塚 et telle que Y( 見) = y . Si l’on a dim V = n et si (y 1, ..., y n ) est une base de T(V) size=1塚( size=1見), on obtient, par transport équipollent, n familles Y1(t ), ..., Yn (t ) qui, pour tout t , définissent une base de T(V) size=1塚(t ). S’il existe une fonction 﨏 telle que le vecteur Z(t ) = 﨏(t )Y(t ) se transporte de façon équipollente, on dit que Y se transporte parallèlement ; il revient au même de dire qu’il existe une fonction 﨏 telle que: On remarque que la correspondance:
On remarque que la correspondance: n’est pas un tenseur de type (1, 2): elle est face=F9796 C 秊-linéaire en X et en 諸, mais elle n’est que R-linéaire en Y. Cependant, à partir d’une connexion linéaire, on peut construire deux tenseurs classiques:– le tenseur de torsion T, de type (1, 2), défini par:
n’est pas un tenseur de type (1, 2): elle est face=F9796 C 秊-linéaire en X et en 諸, mais elle n’est que R-linéaire en Y. Cependant, à partir d’une connexion linéaire, on peut construire deux tenseurs classiques:– le tenseur de torsion T, de type (1, 2), défini par: – le tenseur de courbure R, de type (1, 3), défini par:
– le tenseur de courbure R, de type (1, 3), défini par: La dérivée covarianteSur une variété riemannienne, on dit qu’une connexion 暴 est riemannienne si, chaque fois que deux familles de vecteurs Y(t ) et Z(t ) se transportent de façon équipollente le long d’une courbe 塚, le produit scalaire de Y(t ) par Z(t ) est indépendant de t . Cela signifie encore que, si l’on transporte le long d’une courbe une base orthonormale, elle reste orthonormale. Pour que cette propriété soit vérifiée, il faut et il suffit que, pour trois champs (X, Y, Z) quelconques, on ait:
La dérivée covarianteSur une variété riemannienne, on dit qu’une connexion 暴 est riemannienne si, chaque fois que deux familles de vecteurs Y(t ) et Z(t ) se transportent de façon équipollente le long d’une courbe 塚, le produit scalaire de Y(t ) par Z(t ) est indépendant de t . Cela signifie encore que, si l’on transporte le long d’une courbe une base orthonormale, elle reste orthonormale. Pour que cette propriété soit vérifiée, il faut et il suffit que, pour trois champs (X, Y, Z) quelconques, on ait: On démontre que, sur toute variété riemannienne, il existe une connexion riemannienne et une seule dont le tenseur de torsion est identiquement nul; on l’appelle la dérivée covariante et on la notera D. Cette connexion est encore caractérisée par le fait que, pour toute géodésique 塚, le vecteur tangent à 塚 se transporte parallèlement le long de 塚; autrement dit, on a:
On démontre que, sur toute variété riemannienne, il existe une connexion riemannienne et une seule dont le tenseur de torsion est identiquement nul; on l’appelle la dérivée covariante et on la notera D. Cette connexion est encore caractérisée par le fait que, pour toute géodésique 塚, le vecteur tangent à 塚 se transporte parallèlement le long de 塚; autrement dit, on a: où 﨏 est une fonction de classe 暈 秊, et même, si l’on a choisi la longueur comme paramètre sur 塚,
où 﨏 est une fonction de classe 暈 秊, et même, si l’on a choisi la longueur comme paramètre sur 塚, ExemplesSur la variété En munie de sa structure riemannienne habituelle, une famille de vecteurs Y se déplace de façon équipollente le long d’une courbe 塚, par la dérivée covariante, si et seulement si tous les vecteurs Y( 塚(t )) sont équipollents, au sens banal, à un même vecteur Y0.Si une famille de vecteurs Y se déplace de façon équipollente, pour la dérivée covariante, le long d’un cercle C tracé sur la sphère de Riemann, la mesure 見(M) de l’angle de Y(M) avec la tangente à C en M varie proportionnellement à la distance parcourue: si C est un grand cercle, cette variation est nulle, mais, pour un cercle C quelconque, la variation de 見 pour un tour complet est égale à 2 神 cos , où est l’angle au centre du cercle C (fig. 6 a).On voit sur cet exemple que, si l’on transporte un vecteur le long d’une courbe fermée, après un tour complet ce vecteur ne revient pas toujours à sa position initiale. Ce phénomène est général; il se produit aussi sur le demi-plan de Lobatchevski. Considérons par exemple le quadrilatère géodésique de la figure 6 b; si l’on transporte le vecteur Y0 tangent en A le long de son bord, on trouve successivement YB en B, YC en C, YD en D, puis Y1 en revenant en A, comme on s’en convaincra facilement en remarquant que le transport le long d’une géodésique conserve la mesure de l’angle du vecteur transporté et de la tangente à la géodésique, soit respectivement 見, 廓, 塚 et 嗀.8. CourbureConsidérons une variété V munie d’une connexion 暴 et une courbe 塚 tracée sur V; si m est un point de 塚 et si l’on transporte le long de 塚 un vecteur t tangent à V en m , après un tour complet on obtient un vecteur 﨏(t ) tangent à V en m . On définit ainsi une application linéaire 﨏 de T(V)m dans lui-même. Les exemples donnés au chapitre 7 montrent que 﨏 n’est pas en général l’application identique. Si l’on observe ce qui se passe pour les surfaces, on voit que, pour le plan, 﨏 est toujours l’identité, mais que, pour les surfaces suffisamment «tordues» comme la sphère, 﨏 n’est pas l’identité. C’est pourquoi l’on a donné le nom de tenseur de courbure au tenseur qui «mesure» pourquoi 﨏 n’est pas l’identité. On a écrit ci-dessus (cf. la dernière formule de Les connexions linéaires ) l’expression qui permet de calculer ce tenseur.Donnons-nous une surface paramétrée régulière passant par le point m de V; elle est définie par une application : UV, où U est un ouvert de R2. On suppose que m = (0) et on considère le bord 臨 du carré:
ExemplesSur la variété En munie de sa structure riemannienne habituelle, une famille de vecteurs Y se déplace de façon équipollente le long d’une courbe 塚, par la dérivée covariante, si et seulement si tous les vecteurs Y( 塚(t )) sont équipollents, au sens banal, à un même vecteur Y0.Si une famille de vecteurs Y se déplace de façon équipollente, pour la dérivée covariante, le long d’un cercle C tracé sur la sphère de Riemann, la mesure 見(M) de l’angle de Y(M) avec la tangente à C en M varie proportionnellement à la distance parcourue: si C est un grand cercle, cette variation est nulle, mais, pour un cercle C quelconque, la variation de 見 pour un tour complet est égale à 2 神 cos , où est l’angle au centre du cercle C (fig. 6 a).On voit sur cet exemple que, si l’on transporte un vecteur le long d’une courbe fermée, après un tour complet ce vecteur ne revient pas toujours à sa position initiale. Ce phénomène est général; il se produit aussi sur le demi-plan de Lobatchevski. Considérons par exemple le quadrilatère géodésique de la figure 6 b; si l’on transporte le vecteur Y0 tangent en A le long de son bord, on trouve successivement YB en B, YC en C, YD en D, puis Y1 en revenant en A, comme on s’en convaincra facilement en remarquant que le transport le long d’une géodésique conserve la mesure de l’angle du vecteur transporté et de la tangente à la géodésique, soit respectivement 見, 廓, 塚 et 嗀.8. CourbureConsidérons une variété V munie d’une connexion 暴 et une courbe 塚 tracée sur V; si m est un point de 塚 et si l’on transporte le long de 塚 un vecteur t tangent à V en m , après un tour complet on obtient un vecteur 﨏(t ) tangent à V en m . On définit ainsi une application linéaire 﨏 de T(V)m dans lui-même. Les exemples donnés au chapitre 7 montrent que 﨏 n’est pas en général l’application identique. Si l’on observe ce qui se passe pour les surfaces, on voit que, pour le plan, 﨏 est toujours l’identité, mais que, pour les surfaces suffisamment «tordues» comme la sphère, 﨏 n’est pas l’identité. C’est pourquoi l’on a donné le nom de tenseur de courbure au tenseur qui «mesure» pourquoi 﨏 n’est pas l’identité. On a écrit ci-dessus (cf. la dernière formule de Les connexions linéaires ) l’expression qui permet de calculer ce tenseur.Donnons-nous une surface paramétrée régulière passant par le point m de V; elle est définie par une application : UV, où U est un ouvert de R2. On suppose que m = (0) et on considère le bord 臨 du carré: L’ensemble ( 臨) est une courbe fermée qui passe par m . Notons 﨏x ,y l’application linéaire de T(V)m dans lui-même qui correspond à ( 臨). Si x et y tendent vers zéro, 﨏x ,y tend vers l’identité. Le tenseur de courbure donne la limite de:
L’ensemble ( 臨) est une courbe fermée qui passe par m . Notons 﨏x ,y l’application linéaire de T(V)m dans lui-même qui correspond à ( 臨). Si x et y tendent vers zéro, 﨏x ,y tend vers l’identité. Le tenseur de courbure donne la limite de: On utilise aussi des formes simplifiées du tenseur de courbure, comme la courbure sectionnelle, la courbure de Ricci et la courbure scalaire.
On utilise aussi des formes simplifiées du tenseur de courbure, comme la courbure sectionnelle, la courbure de Ricci et la courbure scalaire.
Encyclopédie Universelle. 2012.